|
|
|
| Benaming van de basisgrootheid |
| Benamingen: Bedekking, wolkenbasis |
| Internationale aanduiding: Cloud amound, cloud base. |
| |
| Definities, omschrijving van de begrippen |
| |
| Wolk |
Een wolk is een verzameling zeer kleine waterdruppels of ijskristallen of beiden, waarvan de basis boven en los van het aardoppervlak gelegen is.
De maximale diameter van de vloeibare waterdeeltjes is in de ordegrootte van 200 micron (0,2 mm). Een groter formaat leidt tot neerslag van
de druppels (regen, drizzle). Met uitzondering van enkele zeldzame types, zoals lichtende nachtwolken en soms cirrus in de lage stratosfeer,
bevinden wolken zich in de troposfeer. Wolken ontstaan onder meer bij verticale luchtbewegingen, zoals bij convectie, opstuwing van lucht bij
bergen en heuvels, en bij grootschalige verticale bewegingen onder invloed van frontale systemen. Hierbij worden de condities geschapen die de
in de lucht aanwezige waterdamp doet overgaan in de vloeibare of vaste fase. |
| |
| Bedekking (cloud amount) |
Onderscheiden worden de bedekking van de hemel door een specifiek aanwezig wolkentype (partial cloud amount) en de totale bedekking van
de hemel door alle aanwezige wolkentypes (total cloud amount). In beide gevallen wordt de mate van bedekking, de zogeheten bedekkingsgraad, deze wordt bij menselijke waarnemingen geschat en berekend bij automatische waarnemingen en weergegeven in okta’s. |
| |
| Wolken basis (cloud base) |
De wolkenbasis betreft de laagste zone boven het aardoppervlak waarbij in loodrechte richting naar bovengaand sprake is van een evidente verandering van heldere, doorzichtige lucht naar lucht die gevuld is met waterdruppels of ijskristallen en min of meer ondoorzichtig is.
De hoogte van de wolkenbasis is gedefinieerd als de hoogte in meters van genoemde zone boven het grondniveau van het station.
In het geval van een meteorologisch luchtvaartstation is dit niveau de officiële hoogte ten opzichte van het gemiddeld zeeniveau hoogte
van het vliegveld. Wolkenhoogte is cloud height of cloud height = height of cloud base. |
| |
| Wolkenclassificaties |
| Diverse classificaties worden onderscheiden. We kennen in de eerste plaats de verdeling in karakteristieke vormen: |
| |
| Typen: |
| Basisonderverdeling van wolken, 3 typen: cirrus, cumulus, stratus. |
| |
| Geslachten (eng: generation): |
Aanvulling op basisonderverdeling, 10 geslachten: cirrus, cirrocumulus, cirrostratus, altocumulus, altostratus, nimbostratus, stratocumulus,
stratus, cumulus,cumulonimbus |
| |
| Soorten: |
| Onderverdeling van geslacht naar vorm en structuur, bijv. fractus, congestus, lenticularis, castellanus, etc. |
|
| Variëteiten: |
| kenmerken per geslacht naar toestand (cloud arrangement) en mate van transparantie, bijv. radiatus, undulatus, duplicatus, etc. |
|
| Bijzondere vormen en verschijnselen: |
| bijv. incus, mamma, virga, praecipitatio, arcus, tuba, pileus, velum, pannus, e.a. |
|
| Aangroeiingen of ontwikkelingen vanuit de moederwolk: |
het gaat om aangroeiingen of ontwikkelingen die kunnen leiden tot nieuwe wolken. In de naam vinden we de potentieel nieuwe wolk terug
alsmede de naam van de moederwolk (in deze volgorde). Indien sprake is van een nieuwe wolk met behoud van de moederwolk dan wordt dit aangegeven met de toevoeging “genitus”, is sprake van een nieuwe wolk onder gelijktijdige verdwijning van het grootste deel van de moederwolk dan wordt dit beschreven met de toevoeging “mutatus”. Voorbeelden: stratocumulus cumulogenitus, stratus stratocumulomutatus. |
|
| Voorts wordt een classificatiegehanteerd met betrekking tot de wolkenlagen, niveau of etage: laag, middelbaar en hoog. |
| |
| laag: |
| 0 – 2100 m (0 - 7000 ft); beschrijving wolkencomplexen in deze laag met code CL |
Lage wolken zijn stratocumulus, stratus, cumulus, cumulonimbus; de twee laatstgenoemde wolkengeslachten bereiken vaak ook het
middelbare en hoge niveau; |
| |
| middelbaar: |
| 2100 – 5400 m (7000 – 18000 ft); beschrijving wolkencomplexen in deze laag met code CM |
Middelbare wolken zijn altocumulus, altostratus (deze reikt vaak ook tot hoger niveau), nimbostratus (deze wolken strekken zich gebruikelijk
uit tot lager en hoger niveau); |
| |
| hoog: |
| > 5400 m ( > 18000 ft.) |
| Beschrijving wolkencomplexen in deze laag met code |
| |
| Zie voor meer over wolken de wolkenatlas |
| |
| Eenheden |
| De gebruikte eenheden zijn conform het internationale stelsel van eenheden (SI) |
| - wolkenhoogte: meter of voet (1) |
| - bedekkingsgraad: okta (2) |
|
| 1: in luchtvaartmeteorologische toepassingen wordt meestal de eenheid voet (engels: foot of ft.) gebruikt. |
| 2: okta is een achtste deel van de hemelkoepel gezien vanuit het waarneempunt. |
| |
| Elementcodes (zie handboek H15) |
| |
| Bedekkingsgraad: |
De mate waarin de hemel bedekt is met wolken.
Deze wordt aan de hand van schattingen bepaald en uitgedrukt in achtsten. 0/8 is onbewolkt, 4/8 is halfbewolkt en 8/8 is geheel bewolkt. |
| |
 |
Wolkenloos |
 |
1/8 |
 |
2/8 |
 |
3/8 |
 |
4/8 |
 |
5/8 |
 |
6/8 |
 |
7/8 |
 |
Bewolkt |
 |
Hemel
niet zichtbaar |
|
| |
| No: 9, deze wordt gebruikt als de bovenlucht niet te detecteren is vanwege mist en/of andere meteorologische verschijnselen |
| / Bedekkinggraad niet te bepalen door andere redenen dan mist of andere meteorologische verschijnselen, c.q. geen detectie. |
| Meetbereik: |
| bedekkingsgraad: 0 – 8/8 |
| hoogte wolkenbasis: < 30 m – 30 km |
| |
| Waarneemresolutie in berichtgeving |
| bedekkingsgraad: 1/8 |
| hoogte wolkenbasis: 30 m |
| |
| Vereiste nauwkeurigheid in de meting |
| bedekkingsgraad: 1/8 |
| hoogte wolkenbasis: 10 m bij ≤ 100 m en 10 % bij > 100 m |
| |
| Vereiste nauwkeurigheid in de berichtgeving |
| bedekkingsgraad: 1/8 |
| hoogte wolkenbasis: 10 m |
| |
| Instrumenten en techniek |
| |
Het door het KNMI operationeel gebruikte instrument voor de meting van de wolkenhoogte is een LD40 wolkenhoogte meter.
Fabrikant: Vaisala (voorheen: Impulsphysik). |
| |
| Meetprincipe |
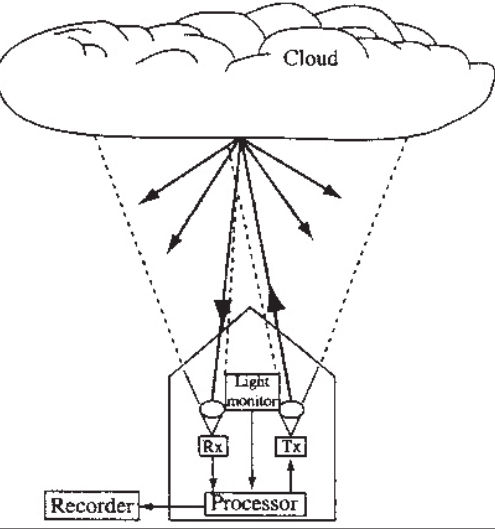
| De sensor maakt gebruik van het zgn. LIDAR-principe: LIght Detection And Ranging. |
| |
| - een lichtbron zendt een verticale laserpuls uit |
| - een sensor ontvangt het gereflecteerde cq –verstrooide signaal |
- het tijdverschil en de intensiteit van het teruggekeerde signaal bepalen respectievelijk de hoogte
en de concentratie van de deeltjes (aantal deeltjes per volume). |
- de gradiënt van het ontvangen signaal als functie van de hoogte bepaalt of de reflectie geschiedt
als gevolg van bewolking, neerslag of andere objecten. In het laatste geval is sprake van een
beperkt verticaal zicht. |
| |
| Lichtbron |
De lichtbron is een laser die met een frequentie van 6494Hz pulsen uitzendt in het nabije
infrarood (855 nm). |
| |
| Sensor |
De detector ontvangt het gereflecteerde cq –verstrooide signaal. Gemeten wordt het tijdsverschil
tussen het uitzenden van een puls en de ontvangst van het teruggekaatste c.q. verstrooide licht.
Uit dit tijdsverschil kan de hoogte worden afgeleid van het deeltje dat de reflectie veroorzaakte. |
|
|
|
| Werking laser ceilometer |
|
| |
De detector registreert in tijdsintervallen van 50 nsec, hetgeen correspondeert met hoogte intervallen van 25 voet. De openingshoek van de
sensor is ongeveer 1.2 mrad (ca.0,069 booggraden). Daarmee bestrijkt het instrument een gebied met een diameter van ongeveer 12 m
op 10 km hoogte. De zender en ontvanger hebben een gescheiden optisch pad. Hierdoor zullen de bundels van de uitgezonden laserstraal en
de openingshoek van de detector elkaar pas overlappen boven een hoogte van ongeveer 300 voet. Een wolkenbasis lager dan 300 voet wordt
gedetecteerd doordat als gevolg van meervoudige verstrooiing in de wolk toch een signaal van de laser in de detector komt. Door analyse van
het tijdsverschil en de sterkte van het geregistreerde signaal kan dan, ondanks het onbekende traject vanwege de meervoudige reflecties,
toch een goede inschatting van de wolkenhoogte worden gemaakt. |
| |
Het verticale bereik van de sensor is van 25 tot en met maximaal 43000 voet met een meetnauwkeurigheid van 25 voet. De sensor geeft
uiteraard alleen de bewolking die over de sensor trekt. Het maximale verticale bereik van de sen sor zal in aanwezigheid van een optisch
dikke wolk of in een troebele atmosfeer minder zijn. Met name bij neerslag zal de sensor een groot verstorend signaal ontvangen.
In het algemeen geeft de sensor ook in deze omstandighe den de wolkenbasis correct weer en niet de neerslag. In situaties dat de sensor
compleet in de mist staat meldt de sensor bewolking op 25 voet. De sensor registreert het maximale meetbereik bij de meting. In een troebele atmosfeer of bij een dikke wolkenlaag geeft de sensor hiermee aan dat geen informatie beschikbaar is boven het maximale bereik. |
| |
| Opstelling wolkenhoogtemeter |
De wolkenhoogtemeter staat niet verticaal opgesteld, maar helt onder een hoek van 5° naar het noorden. Er is gekozen voor deze opstelling
omdat met deze opstelling het signaal van neerslag enigszins wordt onderdrukt in vergelijking met het signaal van bewolking. Zwevende wolkendruppels zijn bolvormig en de terugverstrooiing is daarom gelijk bij een verticale of schuine opstelling van de wolkenhoogtemeter.
Vallende neerslag daarentegen is afgeplat. Bij een schuine opstelling zal het terugverstrooide signaal minder zijn dan bij een verticale opstelling
omdat het deeltje niet meer symmetrisch is ten opzichte van de verstrooiingsrichting. |
| Signaalverwerking |
De sensor meet voor iedere uitgezonden puls het terugverstrooide vermogen
als functie van de tijd c.q. hoogte. Deze zogenaamde backscattercoëffi ciënt
is een maat voor het aantal en grootte van deeltjes zoals wolkendruppels, regen druppels en/of aërosol (stof of andere vaste deeltjes) op de betreffende hoogte in de atmosfeer. Omdat het uitgezonden vermogen van één aserpuls onvoldoende is om bewolking goed te kunnen detecteren, wordt het
ontvangen signaal van meerdere pulsen geïntegreerd. Op deze manier wordt
de bijdrage van ruis onderdrukt in het voordeel van het werkelijke signaal. Tevens wordt de systematische bijdrage van ruis, die per instrument gekarakteriseerd is door metingen verricht bij afgedekte ontvanger, van de meting afgetrokken.
In het aldus verkregen backscatterprofi el, dat elke 15 seconden door de
sensor wordt ververst, wordt vervolgens gezocht naar de signatuur van wolken. Hiervoor wordt gebruik gemaakt van de waarde van
de backscattercoefficiënt alsmede de gradiënt ervan om neerslag en aërosol van wolkendrup pels te kunnen onderscheiden. Afhankelijk van de hoogte
wordt het backscat ter signaal geïntegreerd over 15 tot 120 seconden en worden andere criteria voor wolkendetectie gebruikt. Om de detectie van
hoge cirrus bewolking mogelijk te maken vindt zelfs integratie over 10 minuten plaats in combinatie met middeling over hoogte-intervallen. |
|
|
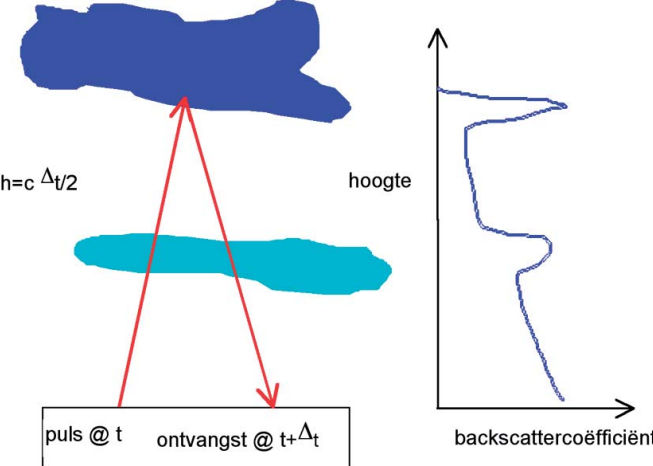 |
Schematische weergave van de werking van een
lidar wolkenhoogtemeter |
|
| |
| Detectie meerdere wolkenlagen |
| De sensor kan melding maken van de volgende situaties: |
| |
| - een onbewolkte situatie. |
| - 1, 2 of 3 wolkenlagen gedetecteerd |
| - er is een obstructie waargenomen, maar deze voldoet niet aan de criteria voor bewolking. |
| |
De laatste situatie wordt door de sensor gemeld als onbewolkt, maar met een verticaal zicht. Deze situatie komt soms voor bij hevige neerslag
of sneeuw. De sensor kan maximaal 3 wolkenlagen tegelijk detecteren (indien aanwezig en mits de onderliggende wolkenlagen voldoende
transparant zijn). Boven dien kunnen hogere lagen zonder optische beperking waargenomen worden, indien gedurende een deel van de
middelingstijd tijdelijk geen sprake was van lagere wolkenlagen (bijvoorbeeld omdat deze lagen bestaan uit voortdrijvende losse wolken). |
| Kwaliteitscontrole meting |
De sensor bevat een referentie detector en een referentie laser. Deze worden gebruikt om het vermogen van laser en de gevoeligheid van de detector te meten en zo nodig bij te stellen.
Een aparte detector bij de zender registreert eventuele verstrooiing aan het venster van de zender. De mate van verstrooi ing bepaalt de mate van vervuiling. Indien het verstrooide signaal boven een bepaalde drempelwaarde uitkomt (50%), wordt een waarschuwing gegene reerd. Daarnaast wordt regelmatig een (verwarmde) luchtstroom over het venster geblazen om neerslag te verwijderen. |
| |
| Sensoroutput |
| a) wolkenbasishoogte van 3 lagen: C1, C2, C3 (eenheid: voet) |
| b) verticaal zicht ZV (eenheid: voet) |
| c) maximaal verticaal bereik CX (eenheid: voet) |
| d) backscatter aan venster van zender WBS (eenheid: %) |
| |
De actuele meetwaarden C1, C2, C3, ZV en CX worden geleid
naar de XC4. De wolkenbases en het bereik worden opgeslagen in tientallen voet. Dit door de sensorwaarden te delen door 10 en
af te ronden. Het verticaal zicht wordt opgeslagen in meters |
| |
| Onderhoud- en calibratieprocedures |
De onderhoud- en calibratieprocedures zijn vastgelegd in het
ISO-9001 kwaliteitssysteem Operationeel Handboek van de Instrumentele Afdeling. De (her-)ijking van de operationeel
gebruikte c.q de te gebruiken instrumenten geschiedt in het IJklaboratorium van het KNMI. |
|
|
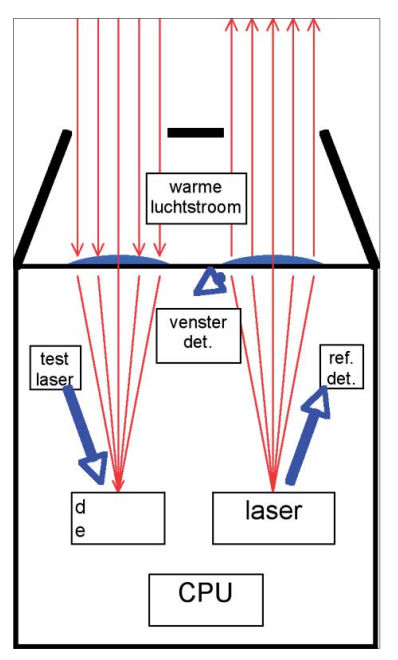 |
Schematische weergave van
de werking |
|
|
 |
| LD40 wolkenhoogtemeter |
|
| |
| Procedures |
| |
| Procedures bij uitval automatische waarnemingen |
De operationele berichtgeving SYNOP/ METAR/SPECI met betrekking tot wolken vereist in principe een 100% beschikbaarheid van data.
Deze principe voorwaarde impliceert voor ieder operationeel meteorologisch waarneemstation een permanente beschikbaarheid van het
wolkendetectiesysteem, inclusief datatransport. Bij uitval van het systeem dient de reparatieprocedure met onmiddellijke ingang te worden
gestart. De details zijn beschreven in het meetsysteembeheer storingsregeling. |
| |
| procedures voor achteraf validatie van de bewolking AUTO-SYNOP (zie handboek H15) |
| |
| Procedures voor inspectie |
Iedere wolkenmeter met een operationele functie in het KNMI-meetnet wordt in principe 2 maal per jaar geïnspecteerd door een
stationsinspecteur. Op de vliegbases van de Koninklijke Luchtmacht vindt deze inspectie uit logistieke overwegingen 1 maal per jaar plaats.
Per vliegbasis controleert de staf aldaar tussentijds de meetomstandigheden. De wolkenmeters op Schiphol met een lokale functie, die uitsluitend
ten behoeve van de nabije start-/landingsbaan, worden eveneens uit logistieke overwegingen slechts 1 maal per jaar geïnspecteerd door een stationsinspecteur. De Havendienst van deze luchthaven controleert tussentijds de meetomstandigheden |
| |
| De inspectie omvat de volgende controles: |
- Een visuele beoordeling of de meetomstandigheden en de omgeving aan de gestelde condities voldoen. Indien dit niet het geval is, kwalificeert
de inspecteur de betreffende locatie voor wat betreft de operationel wolkenmetingen met onmiddellijke ingang als onvoldoende. Afhankelijk van
de situatie beoordeelt de stationsinspecteur welke correctieve acties ondernomen dienen te worden om een en ander te herstellen conform de
operationele eisen. De acties kunnen variëren van een opdracht c.q. verzoek aan de beheerder van het betreffende waarneemterrein tot
aanpassing van de terreinsituatie tot de start van een procedure om een nieuwe locatie te zoeken. Bij defecten aan de meetopstelling wordt
een opdracht voor herstel aan de afdeling meetsysteembeheer gestuurd. |
- Controle of de ijktermijn van het meetinstrument nog niet is verlopen. Is dit het geval dan wordt de afdeling meetsysteembeheer hierover
geïnformeerd, opdat uitwisseling zal plaatsvinden. |
| |
| Opstellingseisen en omgevingscondities |
|
De wolkenmeter is geplaatst op vlak terrein. De opstelling is niet geheel verti caal, maar helt onder een hoek van 5° naar het noorden.
Aldus kan het signaal van reflectie door neerslag enigszins worden onderdrukt in vergelijking met het signaal van reflectie door bewolking.
De uittredende bundel mag niet onderbroken worden door objecten in de nabijheid van de meetlocatie, zoals boomtakken, kabels, e.d.
In de omgeving mogen geen bronnen zijn die door verstuiving het bovenglas van de meter kunnen bevuilen, vgl. zandhopen, e.d. |
|
| Condities m.b.t. omgeving en meetlocatie, c.q. representativiteit waarnemingen |
|
| De condities zijn gerelateerd aan onderstaande functionaliteiten: |
- synoptische berichtgeving (SYNOP) van wolkeninformatie (bedekking, hoogte wolkenbases, type bewolking): de wolkenwaarneming/-meting
dient representatief te zijn voor de omgeving van het waarneemstation |
- in het geval van een meteorologisch waarneemstation op een vliegveld, berichtgeving aan de luchtvaart van wolkeninformatie (bedekking,
hoogte wolkenbases, type bewolking) ter verspreiding buiten de luchthaven (METAR, SPECIAL): de wolkenwaarneming/-meting dient
representatief te zijn voor het vliegveldterrein, alsmede voor de onmiddellijke omgeving van het vliegveld, alsmede voor de aanvlieg-
routes in verband met de reports for landing |
- in het geval van vliegtuiglandingen op precision approach runways: de wolken waarneming/ -meting (bedekking, hoogte wolkenbases, type
bewolking) dient representatief te zijn voor de situatie ter hoogte van de ILS (Instrument Landing System) middle marker site in de aanvliegroute. |
|
|
|
|
|
|



