|
|
|
| Een bliksemdetector is een apparaat dat de elektromagnetische golf van atmosferische parasieten opvangt die wordt gegenereerd door een bliksemflits afkomstig van een onweersbui. Bliksemdetectoren worden gebruikt door meteorologische diensten, zoals de Meteorological Service of Canada, Météo-France en de US National Weather Service, om onweersbuien op te sporen en mensen te waarschuwen voor hun komst. Diverse andere organisaties, zoals die voor bosbrandpreventie, elektrisch transport, de productie van explosieven en de luchtvaartindustrie, vertrouwen op deze apparaten om hun activiteiten te coördineren. |
 |
| (1) Experimentele bliksem detector |
|
|
 |
| (2) Microstep bliksem detector |
|
|
 |
| (3) Campbell Bliksem detector |
|
| |
| Typen en principes van detectie |
| |
| Er zijn verschillende bliksemdetectiesystemen: |
| |
| Veldmolen |
Een veldmolen is een instrument voor het meten van een statisch elektrisch veld. In de meteorologie maakt dit instrument het mogelijk, dankzij de analyse van het elektrostatische veld erboven, om de aanwezigheid van een elektrisch geladen wolk te signaleren die de dreigende bliksem aangeeft. Het principe bestaat uit het meten van de wisselspanning die wordt gecreëerd op een elektrode die afwisselend wordt gemaskeerd en wordt blootgesteld aan het te meten veld.
Een voorbeeld van een veldmolennetwerk is te vinden in het Kennedy Space Center in Florida. Eenendertig van deze apparaten zijn verspreid over
het centrum en op de lanceerbasis van Cape Canaveral om de vorming van omstandigheden te detecteren die gunstig zijn voor het opwekken van bliksem. De gegevens worden gebruikt door meteorologen die verantwoordelijk zijn voor het voorspellen van het weer voor het ruimteprogramma van de Verenigde Staten bij het lanceren van ruimtevaartuigen. |
| |
 |
| Veldmolen in het Kennedy Space Center in Florida |
|
|
 |
| Luchtfoto van de bliksem detectie op LC-39B van het Kennedy Space Center |
|
| Directionele antennes |
| De meest geavanceerde bliksemdetectoren hebben een horizontale plaatantenne en twee lusantennes die orthogonaal (op 90 graden ten opzichte van elkaar) in de verticaal zijn geplaatst.
Een magnetogoniometer detecteert het elektromagnetische veld dat wordt uitgezonden door de blikseminslag, dit veld veroorzaakt een stroom in de lussen. Er is een verband tussen de
spanning van dit signaal en de grootte van het magnetische veld dat overeenkomt met de cosinus van de hoek tussen de raamantenne en de richting van de blikseminslag. |
| |
| Een vergelijking tussen de amplitudes van de signalen in de twee lussen maakt het mogelijk om de asrichting van de bliksem te bepalen. Er blijft echter een onzekerheid over de richting omdat een cosinus van X en (X + 180) graden hetzelfde resultaat geeft: we weten in welke as de bliksem komt maar nog niet uit welke richting. Om dit op te lossen gebruikt het apparaat de gegevens van de horizontale plaatantenne. |
| |
Dit systeem kan onderscheid maken tussen wolk-grondontladingen en andere vormen van blikseminslag of elektromagnetische signatuurinterferentie. Inderdaad, de bliksem die de grond bereikt, produceert een zeer karakteristieke plotselinge elektrische impuls.
Om de positie van de bliksem te ontdekken, moet u vervolgens de afstand tot de ontvangende antenne vinden. Er zijn twee manieren: |
| |
- Netwerk van ontvangende antennes4: door de richtingen en aankomsttijden van een signaal te trianguleren naar ten minste drie antennes, kan de
positie worden afgeleid. Er zijn drie antennes nodig omdat de bliksem geen puntsignaal is, maar afkomstig is van elk punt tussen het begin en het
einde van de bliksem. Twee antennes kunnen daarom richtingen van verschillende oorsprong noteren en een derde antenne is nodig om de
herkomst binnen een gegeven resolutieradius te bevestigen. |
| - Eén antennesysteem dat mobiel kan zijn: de afstand wordt vervolgens gevonden door de frequentie en amplitude van het signaal te analyseren |
| |
| Per satelliet |
| De detectie van bliksem door een kunstmatige satelliet wordt uitgevoerd door het kijkgebied te scannen op de detectie van lichtflitsen geproduceerd door onweersbuien. Hiervoor worden geostationaire satellieten zoals GOES en METEOSAT gebruikt, die zich ongeveer 36.000 km van de aarde bevinden5. Op deze afstand kan de dikte van de atmosfeer worden verwaarloosd en kan de positie direct in lengte- en breedtegraad worden afgeleid. Wees echter voorzichtig met de parallax die wordt geïntroduceerd door naar de polen te gaan. |
| Netwerken |
Bliksem vindt niet op een enkel punt plaats, maar gaat van punt naar punt in de wolk, of tussen wolken, of zelfs tussen een wolk en de grond.
Het uitgezonden elektromagnetische signaal kan overal langs dit pad komen. Een antenne kan de richting van het begin van de bliksem registreren
en een seconde het einde ervan, wat betekent dat de driehoekslijnen elkaar nooit of op de verkeerde plaats zullen ontmoeten. Bovendien is er
zelden een enkele flits tijdens onweer en bliksem in de buurt, maar die op iets verschillende tijdstippen wordt uitgezonden, kan worden aangezien voor dezelfde flits met alleen de richting die wordt verkregen door twee antennes. |
| |
| Om een stukje data te accepteren, moeten daarom ten minste drie antennes het kunnen trianguleren binnen een bepaalde foutmarge. De afstand wordt berekend door de gecoördineerde aankomsttijd van het elektromagnetische signaal, en niet het geluid, tussen de drie antennes. We kennen inderdaad de lichtsnelheid waarmee het signaal beweegt en door omhoog te gaan in
de richting van waaruit de drie antennes het signaal waarnemen, moeten we op hetzelfde zendtijdstip op het kruispunt aankomen (min of meer de resolutie). De bovengrondse netwerken geven continu indicaties over de positie van de bliksem met een resolutie van 1 km of minder, het Franse netwerk heeft bijvoorbeeld een resolutie van 100 meter. |
| |
In het geval van een wolk-grond-blikseminslag is dit relatief eenvoudig aangezien de zijdelingse afstand die de bliksem aflegt niet erg belangrijk is.
In het geval van blikseminslag tussen wolken kan één antenne echter de richting van de bronwolk bepalen, terwijl de andere naar de ontvangende wolk of ergens anders langs het bliksempad zullen wijzen. Omdat de afstand tussen deze twee wolken mogelijk buiten de foutmarge valt, worden
de gegevens vaak geweigerd. Er wordt geschat op slechts 10% van de hoeveelheid cloud-to-cloud-bliksem waarvoor het probleem is opgelost,
wat de efficiëntie van oppervlaktedetectienetwerken vermindert. Omdat deze vorm van bliksem bij het uitbreken van de storm veel voorkomt,
wordt de gebruiker hiervan op de hoogte gesteld |
| |
| Enkele antenne |
| Bliksemmelders met één antenne pikken alle bliksem op en geven ze een positie. Dit type systeem begint echter met de aanname van een verband tussen de frequentie en de afname van de amplitude van het radiosignaal met de afstand tot de zender om de afstand tot de antenne af te leiden. Bliksem volgt echter niet noodzakelijk deze norm. De besturing zal goed zijn, maar de positiefout kan groot zijn. Bovendien kan een zwak signaal nabij de antenne worden geïnterpreteerd als een sterk signaal veel verder weg (en vice versa). |
| |
| Satelliet |
| De satelliet kan de positie van de bliksem nauwkeuriger waarnemen en heeft niet het probleem dat de bron van de bliksem een enkele sensor is. NASA schat zijn efficiëntie op 95%.
De sensoren moeten echter een volledige scan van het gezichtsveld uitvoeren voordat de informatie naar een terrestrisch relais wordt verzonden. Data is dus maar om de 5 of 10 minuten beschikbaar. Sommige gebruikers kunnen dit soort vertraging niet accepteren. |
| |
| Bliksemdetector en weerradar |
| |
| Bliksemdetectoren worden gebruikt in combinatie met weerradars om de vorming, de positie en het dreigingspotentieel van onweersbuien te detecteren. |
| |
| - Onstabiele lucht ondergaat de stuwkracht van Archimedes |
| - De waterdamp in de lucht condenseert tot wolkendruppels en vervolgens tot neerslag |
| - Wanneer het neerslagpunt groter is dan wat de opwaartse wind kan verdragen, valt de regen en produceert een neerwaartse wind. |
| |
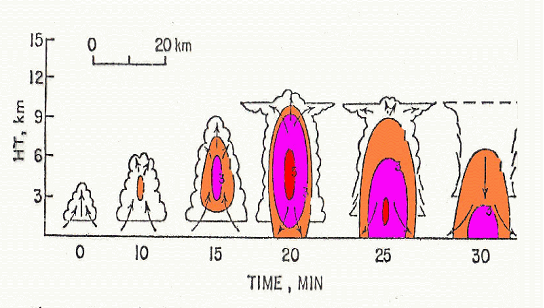 |
| Levenscyclus van een onweersbui met de gesimuleerde reflectiviteiten van een kleurenweerradar |
|
|
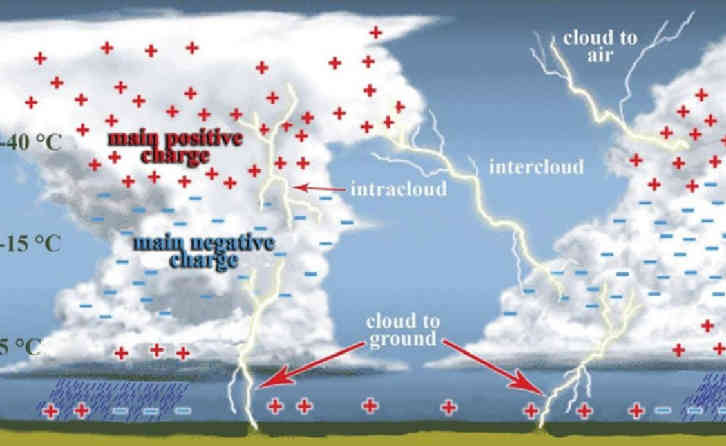 |
| Verdeling van elektrische ladingen en bliksem in en rond onweer. |
|
Meteorologische radars kunnen de evolutie van neerslag op hoogte en nabij de grond volgen, maar kunnen niet zeggen of er een blikseminslag heeft plaatsgevonden. De bliksemdetector geeft deze indicatie. Ook zal er bliksem optreden tussen het aambeeld en de grond voor de storm (tweede afbeelding), waar de radar geen neerslag ziet, kan de bliksemdetector deze informatie
geven. Ten slotte kan, afhankelijk van de gebruikte golflengte, het door de weerradar ontvangen signaal worden verzwakt door hevige neerslag en kunnen onweersbuien achter deze regen
worden gemaskeerd. Omdat de bliksemdetector hier minder last van heeft, zal deze dienen als een onafhankelijk detectiesysteem. |
| |
| De patronen van verandering in reflectiviteit en blikseminslagen zullen meteorologen informatie geven over de structuur van de storm, de intensiteit en het potentieel voor gewelddadig weer:
hagel, tornado's, neergaande windstoten en stortregens. |
| |
| Gebruik in de luchtvaart |
| |
| Grote vliegtuigen gebruiken eerder weerradar dan bliksemdetectoren, aangezien weerradar kleinere stormen kan detecteren die ook turbulentie veroorzaken; moderne elektronische systemen bevatten echter vaak ook bliksemdetectie voor extra veiligheid. |
| |
| Voor kleinere vliegtuigen, vooral in de algemene luchtvaart, zijn er twee hoofdmerken bliksemdetectoren (vaak sferics genoemd, een afkorting van radio-atmosferische eigenschappen): Stormscope, oorspronkelijk geproduceerd door Ryan (later BF Goodrich) en momenteel door L-3 Communications, en the Strikefinder, geproduceerd door Insight. Strikefinder kan IC-aanvallen (intracloud) en CG-aanvallen (cloud to ground) detecteren en correct weergeven, en kan onderscheid maken tussen echte aanvallen en signaalbounces die worden weerkaatst door de ionosfeer. Bliksemdetectoren zijn goedkoop en licht van gewicht, waardoor ze aantrekkelijk zijn voor eigenaren van lichte vliegtuigen (met name van eenmotorige vliegtuigen, waar de neus van het vliegtuig niet beschikbaar is voor de installatie van een radarkoepel). |
| |
| Draagbare bliksemdetectoren |
| |
| Goedkope draagbare bliksemdetectoren en andere bliksem-mappers met één sensor, zoals gebruikt in vliegtuigen, hebben beperkingen, waaronder detectie van valse signalen en een slechte gevoeligheid, met name voor intracloud (IC) bliksem. Draagbare bliksemdetectoren van professionele kwaliteit verbeteren de prestaties op deze gebieden door verschillende technieken die elkaar vergemakkelijken en zo hun effecten vergroten: |
| |
| Verwijdering van valse signalen: |
Een bliksemontlading genereert zowel een radiofrequentie (RF) elektromagnetisch signaal - gewoonlijk ervaren als "statisch" op een AM-radio -
als zeer korte lichtpulsen, bestaande uit de zichtbare "flits". Een bliksemdetector die werkt door slechts één van deze signalen te detecteren, kan signalen die afkomstig zijn van andere bronnen dan bliksem verkeerd interpreteren en een vals alarm geven. In het bijzonder kunnen op RF gebaseerde detectoren RF-ruis, ook wel bekend als RF-interferentie of RFI, verkeerd interpreteren. Dergelijke signalen worden gegenereerd door
veel voorkomende omgevingsbronnen, zoals automatische ontstekingen, fluorescentielampen, televisietoestellen, lichtschakelaars, elektromotoren en hoogspanningskabels. Evenzo kunnen op lichtflits gebaseerde detectoren flikkerend licht dat in de omgeving wordt gegenereerd, verkeerd interpreteren, zoals reflecties van ramen, zonlicht door boombladeren, passerende auto's,
tv-toestellen en fluorescentielampen. |
| |
| Aangezien RF-signalen en lichtpulsen zelden gelijktijdig optreden, behalve wanneer ze worden geproduceerd door bliksem, kunnen RF-sensoren en lichtpulssensoren nuttig worden aangesloten in een "coincidentieschakeling" die beide soorten signalen tegelijkertijd nodig heeft om een output te produceren. [2] Als een dergelijk systeem op een wolk is gericht en er bliksem optreedt in die wolk, worden beide signalen ontvangen; het toevalcircuit zal een output produceren; en de gebruiker kan er zeker van zijn dat de oorzaak bliksem was. Wanneer er 's nachts een bliksemontlading plaatsvindt in een wolk, lijkt de hele wolk op te lichten. Bij daglicht zijn deze intracloud-flitsen zelden zichtbaar voor het menselijk oog; niettemin kunnen optische sensoren
ze detecteren. Tijdens vroege missies keken astronauten door het raam van de spaceshuttle en gebruikten optische sensoren om bliksem te detecteren in heldere, zonovergoten wolken ver beneden ons. Deze toepassing heeft geleid tot de ontwikkeling van de draagbare bliksemdetector met twee signalen die zowel lichtflitsen gebruikt als de ‘sferische’ signalen die door eerdere apparaten worden gedetecteerd. |
| |
| Verbeterde gevoeligheid: |
| In het verleden detecteerden bliksemdetectoren, zowel goedkope draagbare voor gebruik op de grond als dure vliegtuigsystemen, laagfrequente straling omdat bij lage frequenties de gegenereerde signalen door cloud-to-ground (CG) bliksem sterker zijn (hogere amplitude) en zijn dus gemakkelijker te detecteren. HF-ruis is echter ook sterker bij lage frequenties. Om de ontvangst van RF-ruis te minimaliseren, worden laagfrequente sensoren gebruikt met een lage gevoeligheid (signaalontvangstdrempel) en detecteren ze dus geen minder intense bliksemsignalen. Dit vermindert de mogelijkheid om bliksem op grotere afstanden te detecteren, aangezien de signaalintensiteit afneemt met het kwadraat van de afstand. Het vermindert ook de detectie van intracloud (IC) -flitsen die over het algemeen zwakker zijn dan CG-flitsen. |
| |
| Verbeterde Intracloud-bliksemdetectie: |
| De toevoeging van een optische sensor en een toevalcircuit elimineert niet alleen valse alarmen veroorzaakt door RF-ruis; het maakt het ook mogelijk dat de RF-sensor met een hogere gevoeligheid wordt gebruikt en hogere frequenties waarneemt die kenmerkend zijn voor IC-bliksem, waardoor de zwakkere hoogfrequente componenten van C-signalen en meer externe flitsers kunnen worden gedetecteerd. |
| |
| De hierboven beschreven verbeteringen breiden de bruikbaarheid van de detector op veel gebieden aanzienlijk uit: |
| |
| Vroegtijdige waarschuwing: |
| Detectie van IC-flitsen is belangrijk omdat ze meestal optreden van 5 tot 30 minuten voordat CG-flitsen En kan dus een vroegere waarschuwing geven voor zich ontwikkelende onweersbuien. Waardoor de effectiviteit van de detector in persoonlijke veiligheid aanzienlijk wordt verbeterd en toepassingen voor het spotten van stormen in vergelijking met een detector met alleen CG. Verhoogde gevoeligheid waarschuwt ook voor reeds ontwikkelde stormen die verder weg zijn maar zich mogelijk naar de gebruiker toe bewegen. |
| |
| Stormlocatie: |
| Zelfs bij daglicht kunnen "stormjagers" directionele optische detectoren gebruiken die op een individuele wolk kunnen worden gericht om onweerswolken op afstand te onderscheiden.
Dit is vooral belangrijk voor het identificeren van de sterkste onweersbuien die tornado's produceren, aangezien dergelijke stormen hogere flitssnelheden produceren met meer hoogfrequente straling dan zwakkere niet-tornadische stormen. |
| |
| Microburst-voorspelling: |
Microburst-voorspelling: IC-flitsdetectie biedt ook een methode om microbursts te voorspellen. De opwaartse luchtstroom in convectieve cellen begint te worden geëlektrificeerd wanneer deze hoogten bereikt die voldoende koud zijn, zodat hydrometeoren met gemengde fase (water-
en ijsdeeltjes) kunnen bestaan in hetzelfde volume. Elektrificatie treedt op als gevolg van botsingen tussen ijsdeeltjes en waterdruppels of met
water bedekte ijsdeeltjes. De lichtere ijsdeeltjes (sneeuw) worden positief geladen en naar het bovenste gedeelte van de wolk gevoerd, waarbij de negatief geladen waterdruppels in het centrale deel van de wolk achterblijven. Deze twee ladingscentra creëren een elektrisch veld dat tot bliksem leidt. opleiding. De opwaartse luchtstroom
gaat door totdat al het vloeibare water in ijs is omgezet, waardoor latente warmte vrijkomt die de opwaartse luchtstuwing aandrijft.
Wanneer al het water is omgezet, zakt de opwaartse luchtstroom snel in, evenals de bliksemsnelheid. Dus de toename van de bliksemsnelheid tot een grote waarde, voornamelijk als gevolg
van IC-ontladingen, gevolgd door een snelle daling van de snelheid, levert een karakteristiek signaal op
van het ineenstorten van de opwaartse luchtstroom die deeltjes in een neerwaartse uitbarsting naar beneden voert. Wanneer de ijsdeeltjes warmere temperaturen bereiken nabij de wolkenbasis, smelten ze en veroorzaken ze atmosferische afkoeling; Evenzo verdampen de waterdruppels, waardoor ook afkoeling ontstaat. Deze koeling verhoogt de luchtdichtheid, de drijvende kracht achter microbursts. De koele lucht in "windvlagen"
die vaak voorkomen in de buurt van onweersbuien, wordt veroorzaakt door dit mechanisme. |
| |
| Stormidentificatie / -tracking: |
Sommige onweersbuien, geïdentificeerd door IC-detectie en -observatie, maken geen CG-flitsen en zouden niet worden gedetecteerd met een
CG-detectiesysteem. IC-flitsen komen ook vele malen zo vaak voor als CG, dus zorgen voor een robuuster signaal. Door de relatief hoge dichtheid (aantal per oppervlakte-eenheid) van IC-flitsen kunnen convectieve cellen worden geïdentificeerd bij het in kaart brengen van bliksem,
terwijl CG-bliksem te weinig en ver tussen is om cellen te identificeren die typisch ongeveer 5 km in diameter zijn. In de late stadia van een storm neemt de CG-flitsactiviteit af en kan het lijken alsof de storm is beëindigd - maar over het algemeen is er nog steeds IC-activiteit gaande in het residu op middelhoge en hogere cirrus-aambeeldwolken,
dus het potentieel voor CG-bliksem bestaat nog steeds. . |
| |
| Kwantificering van stormintensiteit |
Een ander voordeel van IC-detectie is dat de flitssnelheid (aantal per minuut) evenredig is met de 5e macht van de convectiesnelheid van de opwaartse luchtstroom in de onweerswolk.
Dit niet-lineaire respons betekent dat een kleine verandering in de hoogte van de wolken, nauwelijks waarneembaar op de radar, gepaard zou gaan met een grote verandering in de flitssnelheid. Een nauwelijks merkbare toename van 10% in de hoogte van de bewolking (een maat voor de ernst van de storm) zou bijvoorbeeld een verandering van 60% in de totale flitssnelheid hebben,
wat gemakkelijk kan worden waargenomen. "Totale bliksem" zijn zowel de over het algemeen onzichtbare (bij daglicht) IC-flitsen die in de wolk blijven als de algemeen zichtbare CG-flitsen die te zien zijn van wolkbasis tot grond. Omdat het grootste deel van de totale bliksem afkomstig is van IC-flitsen, vindt dit vermogen om stormintensiteit te kwantificeren meestal plaats door detectie van IC-ontladingen. Bliksemdetectoren die alleen laagfrequente energie detecteren, detecteren alleen IC-flitsen die in de buurt zijn, dus ze zijn relatief inefficiënt voor het voorspellen van microbursts en het kwantificeren van convectieve intensiteit. |
| |
| Tornado-voorspelling: |
| Van zware stormen die tornado's produceren is bekend dat ze zeer hoge bliksemsnelheden hebben en de meeste bliksem van de diepste convectiewolken is IC, daarom het vermogen om
IC-bliksem te detecteren biedt een methode voor het identificeren van wolken met een hoog tornadopotentie. |
| Wanneer een RF-bliksemsignaal op een enkele locatie wordt gedetecteerd, kan men de richting ervan bepalen met behulp van een magnetische richtingzoeker met gekruiste lus, maar het is moeilijk om de afstand te bepalen. Er zijn pogingen gedaan om de amplitude van het signaal te gebruiken, maar dit werkt niet erg goed omdat bliksemsignalen sterk variëren in hun intensiteit. Als je dus de amplitude gebruikt voor het schatten van de afstand, kan het lijken alsof er een sterke flits in de buurt is en een zwakker signaal van dezelfde flits - of een zwakkere flits van dezelfde stormcel - verder weg lijkt te zijn. Men kan zien waar de bliksem binnen een straal van een mijl zal inslaan door ionisatie in de lucht te meten om de nauwkeurigheid van de voorspelling te verbeteren. |
| |
| Om dit aspect van bliksemdetectie te begrijpen, moet men weten dat een bliksemflits over het algemeen uit meerdere flitsen bestaat, een typisch aantal flitsen van een CG-flitser ligt tussen
3 en 6, maar sommige flitsen kunnen meer dan 10 flitsen hebben. De eerste flits laat een geïoniseerd pad achter van de wolk naar de grond en daaropvolgende 'teruggaande flitsen', gescheiden door een interval van ongeveer 50 milliseconden, gaan dat kanaal op. De volledige ontladingssequentie duurt typisch ongeveer ½ seconde, terwijl de duur van de individuele flitsen sterk varieert tussen 100 nanoseconden en enkele tientallen microseconden. De flitsen in een CG-flits kunnen 's nachts worden gezien als een niet-periodieke reeks verlichtingen van het bliksemkanaal.
Dit is ook te horen op geavanceerde bliksemdetectoren als individuele staccato-geluiden voor elke slag, die een onderscheidend patroon vormen. |
| |
| Bliksemdetectoren met één sensor zijn gebruikt in vliegtuigen en hoewel de bliksemrichting kan worden bepaald met een gekruiste lussensor, kan de afstand niet betrouwbaar worden bepaald omdat de signaalamplitude varieert tussen de afzonderlijke flitsen die hierboven zijn beschreven, en deze systemen gebruik amplitude om de afstand te schatten. Omdat de flitsen verschillende amplitudes hebben, zorgen deze detectoren voor een lijn van stippen op het scherm, zoals spaken op een wiel dat zich radiaal uitstrekt vanaf de naaf in de algemene richting van de bliksembron. De stippen bevinden zich op verschillende afstanden langs de lijn omdat de slagen verschillende intensiteiten hebben. Deze karakteristieke lijnen van punten in dergelijke sensorweergaven worden "radiale spreiding" genoemd. Deze sensoren werken in het zeer lage frequentie (VLF) en lage frequentie (LF) bereik (onder 300 kHz) dat de sterkste bliksemsignalen levert: Die gegenereerd door terugkerende flitsen vanaf de grond. Maar tenzij de sensor zich dicht bij de flitsen bevindt, nemen ze de zwakkere signalen van IC-ontladingen niet op die een aanzienlijke hoeveelheid energie hebben in het hoge frequentiebereik (HF) (tot 30 MHz). |
| |
| Een ander probleem met VLF-bliksemontvangers is dat ze reflecties van de ionosfeer oppikken, dus soms kunnen ze het verschil in afstand niet zien tussen bliksem op 100 km afstand en enkele honderden kilometers verderop. Op afstanden van enkele honderden kilometers is het gereflecteerde signaal (de "luchtgolf" genoemd) sterker dan het directe signaal (de "grondgolf" genoemd). |
| |
| De golfgeleider aarde-ionosfeer vangt elektromagnetische VLF- en ELF-golven op. Elektromagnetische pulsen die door blikseminslagen worden uitgezonden, planten zich voort binnen die golfgeleider. De golfgeleider is verspreid, wat betekent dat hun groepssnelheid afhankelijk is van de frequentie. Het verschil in de groepsvertraging van een verlichtingsimpuls op aangrenzende frequenties is evenredig met de afstand tussen zender en ontvanger. Samen met de richtingszoekmethode, dit het lokaliseren van blikseminslagen door een enkel station tot op een afstand van 10.000 km vanaf hun oorsprong. Bovendien worden de eigenfrequenties van de aarde-ionosferische golfgeleider, de Schumann-resonanties bij ongeveer 7,5 Hz, gebruikt om de globale onweersactiviteit te bepalen. |
| |
Vanwege de moeilijkheid om afstand tot bliksem te verkrijgen met een enkele sensor, is de enige huidige betrouwbare methode om bliksem te positioneren via onderling verbonden netwerken
van op afstand geplaatste sensoren die een gebied van het aardoppervlak beslaan met behulp van tijd-van-aankomstverschillen tussen de sensoren en / of gekruiste lagers van verschillende sensoren. Verschillende van dergelijke nationale netwerken die momenteel in de VS actief zijn, kunnen de positie van CG-flitsen leveren, maar kunnen momenteel geen betrouwbare IC-flitsern detecteren en positioneren.
Er zijn een paar kleine netwerken (zoals het LDAR-netwerk van Kennedy Space Center, waarvan een van de sensoren bovenaan dit artikel is afgebeeld) die VHF-systemen voor aankomsttijd hebben en IC-flitsen kunnen detecteren en positioneren. Dit worden lightning mapper-arrays genoemd. Ze bedekken meestal een cirkel met een diameter van 30-40 mijl. |
|
Bronnen: Wikipedia-fr, Wikipedia-en (1) University of Reading (2) Microstep (3) Campell Scientific |
|
|
|
|
|
|




