|
|
Ceilometer of wolkenhoogtemeter |
|
|
Een ceilometer is een apparaat dat een laser of andere lichtbron gebruikt om de hoogte van een wolkenplafond of wolkenbasis te bepalen. Ceilometers kunnen ook worden gebruikt om de aerosolconcentratie in de atmosfeer te meten. Wanneer het op laser is gebaseerd, is het een soort atmosferische lidar.
Een wolk is een verzameling zeer kleine
waterdruppels of ijskristallen of beiden,
waarvan de basis boven en los van het
aardoppervlak gelegen is.
De maximale diameter van de vloeibare
waterdeeltjes is in de ordegrootte van 200
micron (0,2 mm). Een groter formaat leidt
tot neerslag van de druppels (regen, drizzle).
Met uitzondering van enkele zeldzame types,
zoals lichtende nachtwolken en soms cirrus
in de lage stratosfeer,
bevinden wolken zich in de troposfeer.
Wolken ontstaan onder meer bij verticale
luchtbewegingen, zoals bij convectie,
opstuwing van lucht bij bergen en heuvels,
en bij grootschalige verticale bewegingen
onder invloed van frontale systemen. Hierbij
worden de condities geschapen die de in de
lucht aanwezige waterdamp doet overgaan
in
de vloeibare of vaste fase. |
| |
| Bedekking (cloud amount) |
Onderscheiden worden de bedekking van de
hemel door een specifiek aanwezig wolkentype
(partial cloud amount)
en de totale
bedekking van de hemel door alle aanwezige
wolkentypes. In beide
gevallen wordt de mate van bedekking, de
zogeheten bedekkingsgraad wordt geschat door menselijke waarnemingen c.q.
berekend het in geval van automatische
waarnemingen in okta’s. |
| |
| Wolken basis (cloud base) |
| De wolkenbasis betreft de laagste zone boven
het aardoppervlak waarbij in loodrechte
richting naar bovengaand sprake is van een
evidente verandering van heldere,
doorzichtige lucht naar lucht
die gevuld is
met waterdruppels of ijskristallen en min of
meer ondoorzichtig is. De hoogte
van de wolkenbasis is gedefinieerd als de
hoogte in meters van genoemde zone boven het
grondniveau van het station. In het geval
van een meteorologisch luchtvaartstation is
dit niveau de officiële hoogte ten opzichte
van de MSL-hoogte van het vliegveld. |
| Bedekkingsgraad |
| De mate waarin de hemel bedekt is
met wolken.
Deze wordt aan de hand van
schattingen bepaald en uitgedrukt in
achtsten. 0/8 is onbewolkt, 4/8 is
halfbewolkt en 8/8 is geheel
bewolkt. |
|
|
 |
| De LD40 wolkenhoogtemeter |
|
|
 |
Wolkenloos |
 |
1/8 |
 |
2/8 |
 |
3/8 |
 |
4/8 |
 |
5/8 |
 |
6/8 |
 |
7/8 |
 |
Bewolkt |
 |
Hemel
niet zichtbaar |
| De werking van de wolkenhoogtemeter |
| |
| Optische trommel wolkenhoogtemeter |
De eerste celometers gebruikten een roterende trommel met een smalle bundel lichtreflector. Terwijl de trommel rond een horizontale as draaide, werd de straal naar de wolkenbasis geprojecteerd, van horizon tot horizon. Een deel van de straal werd vervolgens door diffusie naar de grond teruggebracht, waar het de basis van de wolk raakte.
Een ontvanger (foto-elektrische cel), op een bepaalde afstand van de trommel en in staat om alleen verticaal te zien, kon dan de hoogtehoek noteren wanneer er een signaal naar hem werd teruggestuurd vanuit de wolk. Door op dit moment te trianguleren tussen de hoek van de trommel
en de horizon, evenals de afstand van de trommel-ontvanger, kan de hoogte van de
wolkenbasis worden bepaald. |
| |
| Laser wolkenhoogtemeter |
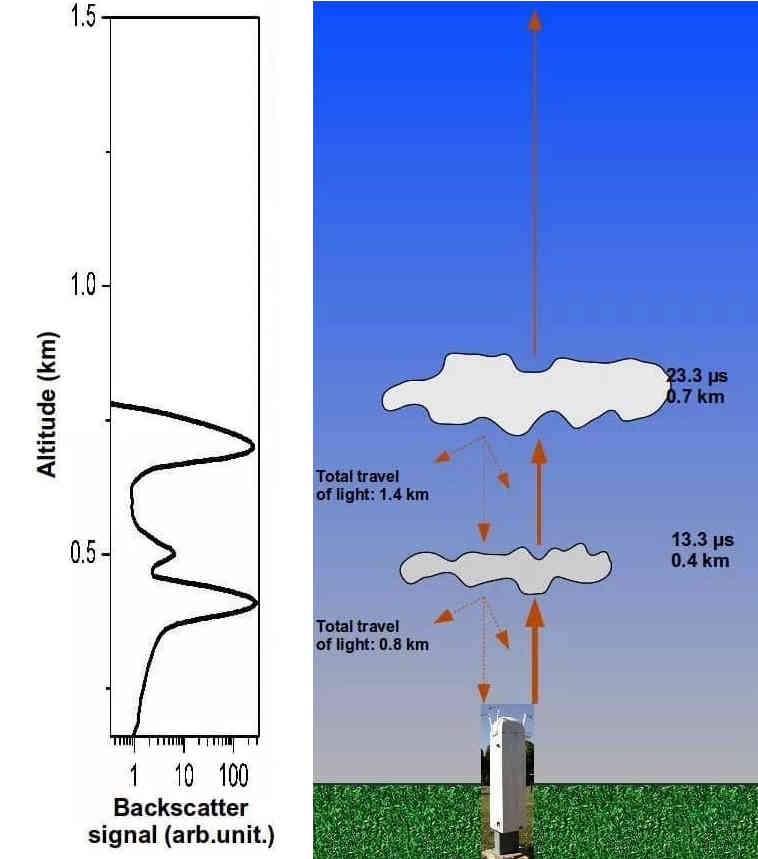
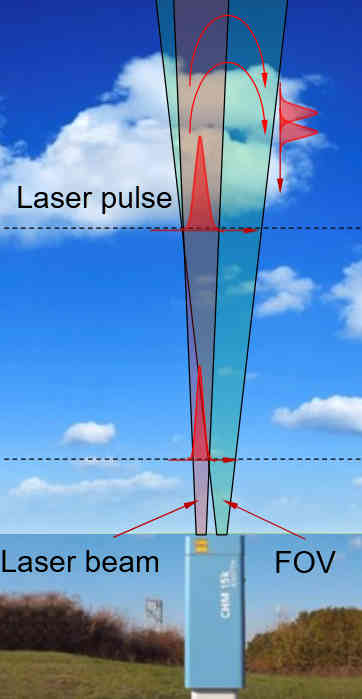
Een laser wolkenhoogtemeter bestaat uit een verticaal wijzende laser en een ontvanger op dezelfde locatie. Een laserpuls met een duur in de orde van nanoseconden wordt door de atmosfeer gestuurd. Terwijl de straal door de atmosfeer reist, worden kleine fracties van het licht verstrooid door aerosolen. Over het algemeen is de grootte van de deeltjes in kwestie vergelijkbaar in grootte met de golflengte van de laser. Deze situatie leidt tot verstrooiing van Mie. Een klein deel van dit verstrooide licht wordt teruggeleid naar de lidar-ontvanger. De timing van het ontvangen signaal kan worden omgezet in een ruimtelijk bereik, z, door de lichtsnelheid te gebruiken.
Op deze manier resulteert elke puls laserlicht in een verticaal profiel van aerosolconcentratie in de atmosfeer. Over het algemeen zullen veel individuele profielen samen worden gemiddeld om
de signaal-ruisverhouding te vergroten en gemiddelde profielen worden gerapporteerd op een tijdschaal van seconden. De aanwezigheid van wolken of waterdruppels leidt tot een zeer sterk retoursignaal in vergelijking met achtergrondniveaus, waardoor wolkenhoogtes gemakkelijk kunnen worden geïdentificeerd.
Voor het bepalen van de wolkenbasis, zal de ceilometer, vanwege het vermogen om deeltjes in de lucht op te vangen (stof, neerslag, rook, enz.),
Af en toe valse metingen geven.
Afhankelijk van de gebruikte drempel kan bijvoorbeeld vallend diamantstof (ijskristallen) ervoor zorgen dat de ceilometer een wolkenhoogte van nul aangeeft, ook al is de lucht helder.
|
 |
| (1) De scanontvanger heeft een afzonderlijke lichtzender die is bevestigd
om de straal verticaal te richten. |
|
|
 |
Onderste lijn = geen reflectie
Bovenste lijn = signaal wordt door de wolken gereflecteerd. |
|
|
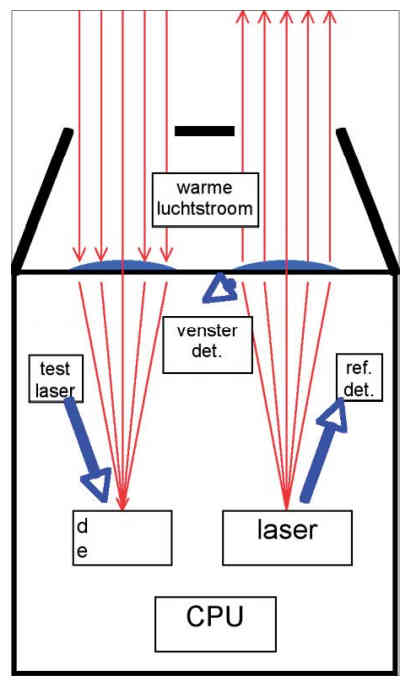 |
schematische tekening van de
belangrijkste onderdelen van de sensor. |
|
| Met behulp van deze laatste eigenschappen zullen ceilometers andere toepassingen hebben. Omdat het instrument eventuele terugkerende signalen opmerkt, is het mogelijk om een zwakke laag te lokaliseren waar deze zich voordoet, naast de basis van de wolk, door naar het hele patroon van teruggestuurde energie te kijken. Bovendien kan de snelheid waarmee diffusie plaatsvindt worden opgemerkt door het afnemende deel dat in heldere lucht naar de ceilometer wordt teruggevoerd, waardoor de uitdovingscoëfficiënt van het lichtsignaal wordt verkregen. Het gebruik van deze gegevens zou het verticale zicht en de mogelijke concentratie van luchtverontreinigende stoffen kunnen opleveren. Dit is ontwikkeld in onderzoek en zou kunnen worden toegepast voor operationele doeleinden. |
| |
| Gebruik van de wolkenhoogtemeter |
| |
| Celometers worden gebruikt in handmatige weerstations om de technicus te helpen bij het bepalen van de hoogte van de wolkenbasis op het moment van waarneming. Hij zal dan zelf hun vertroebeling bepalen. Aan de andere kant wordt in automatische weerstations de celometer gebruikt om bewolking en bewolking in te schatten.
Typisch gebruik is dat van de Meteorologische Dienst van Canada in dit geval. |
| |
| - Uit de spotmeldingen van de celometer bepaalt de stationscomputer de hoogte van de wolkenbasis. |
- Om de bewolking in te schatten, houdt het algoritme bij hoe lang een laag het afgelopen uur boven het station aanwezig was (verspreide wolken
als deze minder dan 50% van de tijd aanwezig is, gefragmenteerd voor 50 tot 89% en weer 90%). % of meer troebel). |
- Als er tijdens het uur meerdere lagen worden gerapporteerd, zal de computer de troebelheid van elk bepalen volgens een algoritme dat niet alleen
rekening houdt met de detectieduur van elk, maar ook met het feit dat een onderste laag een bovenste laag kan blokkeren en daarom de
bewolking ervan kan beperken. detectie. |
| |
| Als de wolk een grotere of kleinere dichtheid heeft, wordt de straal teruggebracht tot een bepaalde dikte voordat hij volledig wordt geblokkeerd door de wolk. De dikte van deze plafondretourlaag geeft een idee van de opaciteit, het type en de dichtheid van de wolk. Het apparaat wordt ook voor andere toepassingen gebruikt omdat het licht dat door de atmosfeer gaat, wordt gereflecteerd door eventuele deeltjes daarin (stof, as, druppels, enz.). Een deel van de lichtbundel kan daarom worden teruggestuurd naar de sensor voordat deze de basis van de wolk bereikt. Dit zwakkere signaal wordt ook opgevangen en gepositioneerd. Het kan een schatting geven van de verticale zichtbaarheid, de aanwezigheid van neerslag en de hoeveelheid vervuilende stoffen in de lucht door de extinctiecoëfficiënt van het signaal te berekenen en zo de werking van een lidar te benaderen. |
| |
| Beperkingen van de wolkenhoogtemeter |
| |
Over het algemeen zijn de gegevens van celometers niet groter dan 4 km, aangezien de lichtbundel geleidelijk wordt verspreid door diffusie op de luchtmoleculen. Aan de andere kant zullen sommige belemmeringen voor het zicht worden opgemerkt als bewolkte plafonds. De beperkingen van
een celometer zijn daarom. |
- Het kan een "heldere" lucht rapporteren ondanks volledige bewolking, en zelfs in de aanwezigheid van neerslag, als de wolken buiten het
detectiebereik van de sensor vallen. |
| - Bij bepaalde sneeuwcondities kan de celometer het plafondniveau onderschatten. |
| - De lasercelometer is buitengewoon gevoelig voor het poeder van ijs, wat leidt tot foutieve waarnemingen van bewolkte luchten. |
| - Het cloud-algoritme kan de omvang van lagen onderscheiden, vooral als ze binnen zijn detectiebereik vallen. |
- Omdat het alleen bewolking detecteert wanneer wolken zich direct boven de sensor bevinden, evalueert het cloud-algoritme alleen lijwaartse
wolken. |
| - Het behoudt de laagste hoogte als basis van de laag en kan daarom wijzen op ietwat te lage bases. |
- Virga's worden vaak gerapporteerd als wolken, wat resulteert in een onderschatting van wolkenhoogtes in vergelijking met handmatige
waarneming. |
- De gerapporteerde luchtcondities zijn afkomstig uit de geschiedenis van wolken die het afgelopen uur over de sensor zijn gepasseerd,
geen momentopname van de huidige omstandigheden. |
| Bronnen: Wikipedia-fr, Wikipedia-en, (1) Askpilot |
|
|
|
|
|
|




