|
|
Lidar - Laser Imaging Detection And Ranging |
|
|
| Remote sensing door laser of lidar, acroniem voor de Engelse uitdrukking "lichtdetectie en -bereik" of "laserbeeldvormingsdetectie en -bereik", is een meettechniek op afstand die is gebaseerd op de analyse van de eigenschappen van een lichtstraal die wordt teruggestuurd naar de zender. |
| |
| In tegenstelling tot radar die radiogolven gebruikt of sonar die akoestische golven gebruikt, gebruikt lidar licht (van het zichtbare spectrum, infrarood of ultraviolet). Dit komt bijna altijd van een laser, en dus coherent. |
| |
| Het principe van telemetrie (het bepalen van de afstand van een object), dat een groot deel van lidar-toepassingen betreft, vereist in het algemeen het gebruik van een gepulste laser. De afstand wordt gegeven door de vertraging te meten tussen het uitzenden van een puls en de detectie van een gereflecteerde puls, de snelheid van het licht kennend. Een andere klasse van toepassingen die gebruikmaakt van snelheidsmeting, maakt gebruik van een laser met een fijn emissiespectrum (een goed gedefinieerde frequentie), gecombineerd met het Doppler-Fizeau-effect, d.w.z. de verschuiving in de frequentie van de gereflecteerde en ontvangen golf, die het vervolgens mogelijk maakt om bepaal de snelheid van het object. In de atmosfeer en andere diffuse media kunnen veel andere parameters (concentraties van gassen en specifieke deeltjes, dichtheid, temperatuur, enz.) worden gemeten als we weten hoe we het effect van de verschillende interacties tussen licht en materie kunnen isoleren. . |
|
| |
| 1: Lidar-afgeleide afbeelding van Marching Bears Mound Group, Effigy Mounds National Monument. |
2: Een FASOR die wordt gebruikt bij de Starfire Optical Range voor lidar- en lasergeleidingsterexperimenten is afgestemd op de natrium D2a-lijn en
wordt gebruikt om natriumatomen in de bovenste atmosfeer te exciteren. |
3: Twee lidars die op telescopen zijn gemonteerd, proberen de afstand aarde-maan te meten door zich te richten op de retroreflectoren die door de
Apollo-missies op de maan zijn afgezet. |
| Het principe van telemetrie (het bepalen van de afstand van een object), dat een groot deel van lidar-toepassingen betreft, vereist in het algemeen het gebruik van een gepulste laser. De afstand wordt gegeven door de vertraging te meten tussen het uitzenden van een puls en de detectie van een gereflecteerde puls, de snelheid van het licht kennend. Een andere klasse van toepassingen die gebruikmaakt van snelheidsmeting, maakt gebruik van een laser met een fijn emissiespectrum (een goed gedefinieerde frequentie), gecombineerd met het Doppler-Fizeau-effect, d.w.z. de verschuiving in de frequentie van de gereflecteerde en ontvangen golf, die het vervolgens mogelijk maakt om bepaal de snelheid van het object. In de atmosfeer en andere diffuse media kunnen veel andere parameters (concentraties van gassen en specifieke deeltjes, dichtheid, temperatuur, enz.) worden gemeten als we weten hoe we het effect van de verschillende interacties tussen licht en materie kunnen isoleren. . |
| |
| Het nut en de nauwkeurigheid van lidar-systemen werd bekend bij het grote publiek in 1971 tijdens de Apollo 15-missie, die de maan in kaart bracht met behulp van een laserhoogtemeter. Hoewel het woord lidar oorspronkelijk was gemaakt door "licht" en "radar" te combineren, wordt aangenomen dat hun naam uit dezelfde periode eerder het acroniem is van "Light Detection And Ranging" of "Laser Imaging Detection And Ranging", zoals radar of sonar. . |
| |
De term lidar omvat een zeer grote verscheidenheid aan lasermeetsystemen op afstand. Maar deze systemen worden soms anders genoemd. Momenteel vinden we nog steeds het acroniem "LADAR" (LAser Detection And Ranging), dat eerder in het militaire veld wordt gebruikt op harde doelen of in de Angelsaksische literatuur. Er is ook het acroniem "ALSM" (Airborne Laser Swath Mapping) voor specifieke toepassingen in de luchttopografie. In het Frans wordt de uitdrukking "laserradar" naar analogie onjuist gebruikt, met name voor verrekijkers met snelheidsregeling
in de verkeersveiligheid. |
| |
| Hoewel de term radar vaak niet langer wordt behandeld als een acroniem (het is niet geschreven in hoofdletters en komt overeen in het meervoud), is de naamgeving van het optische equivalent ervan niet het onderwerp van enige consensus. Zodat we in verschillende referentiepublicaties, soms zelfs in hetzelfde document, "LIDAR", "lidar", "Lidar" of "LiDaR" kunnen vinden. |
Over het algemeen lijkt de werking van lidar op die van radar (gebaseerd op echolocatie), met als verschil het spectrale bereik van de gebruikte elektromagnetische golven. Terwijl radar werkt in het microgolf frequenties van 1 tot 100 GHz, millimeter- en centimetergolflengten, is lidar gebaseerd op lasers die uitstralen in het infrarooddomein, het zichtbare domein of het nabije ultraviolette frequenties boven 10 THz, golflengten
vanaf 250 nm tot 10 µm. In beide gevallen is de uitgezonden elektromagnetische golf coherent en gepolariseerd. Maar in het zichtbare spectrale bereik is het veel directer en kan het interageren met objecten van microscopisch klein formaat. |
| |
| Een lidar is een opto-elektronisch systeem dat bestaat uit een laserzender, een ontvanger bestaande uit een lichtcollector (telescoop of andere optieken) en een fotodetector die het licht omzet in een elektrisch signaal, evenals een elektronische verwerkingsketen van het signaal dat wordt geëxtraheerd de gezochte informatie. |
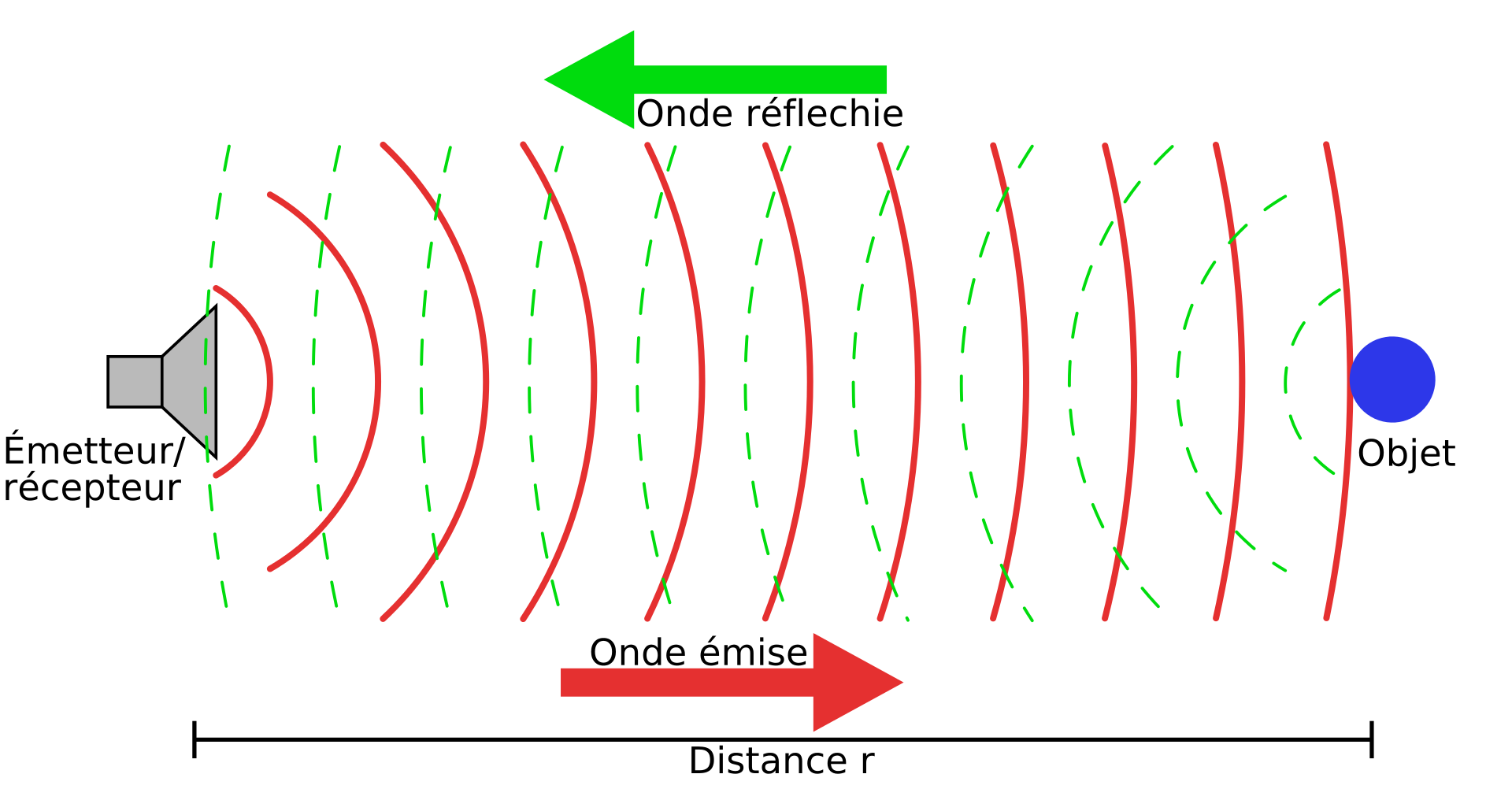 |
| Principe van echolocatie |
|
|
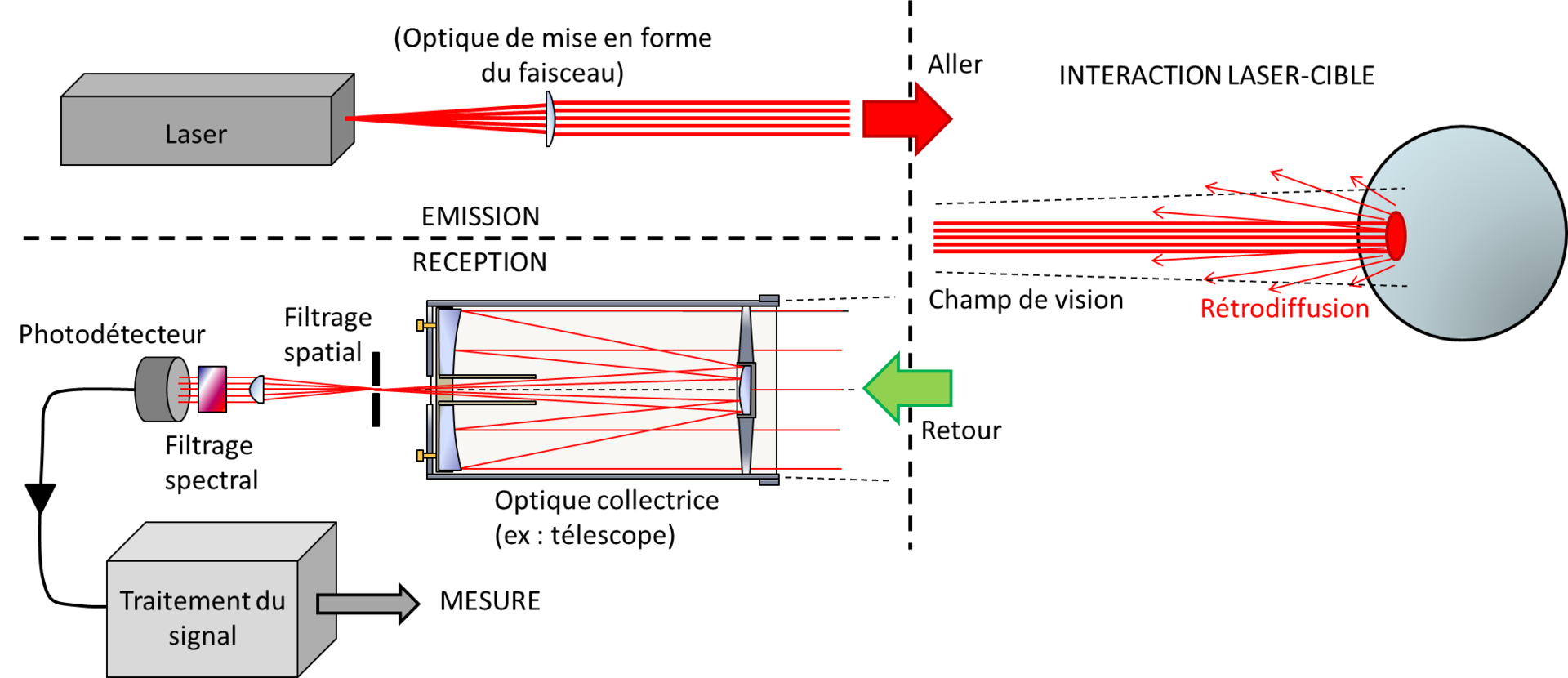 |
| Algemeen schema van een lidar-systeem en het meetprincipe. Merk op dat verzending en ontvangst dezelfde optica kunnen gebruiken. |
|
| |
Lidar gebruikt ultraviolet, zichtbaar of nabij-infrarood licht om objecten in beeld te brengen. Het kan zich richten op een breed scala aan materialen, waaronder niet-metalen voorwerpen, rotsen, regen, chemische verbindingen, aerosolen, wolken en zelfs afzonderlijke moleculen.
Een smalle laserstraal kan fysieke kenmerken met zeer hoge resoluties in kaart brengen; een vliegtuig kan bijvoorbeeld terrein in kaart brengen met een resolutie van 30 centimeter (12 inch) of beter. |
| |
| Het essentiële concept van lidar is ontstaan door EH Synge in 1930, die het gebruik van krachtige zoeklichten voor ogen had om de atmosfeer te onderzoeken. Lidar is sindsdien op grote schaal gebruikt voor atmosferisch onderzoek en meteorologie. Lidar-instrumenten die op vliegtuigen en satellieten zijn gemonteerd, voeren landmetingen en kartering uit - een recent voorbeeld is de Lidar van de U.S. Geological Survey Experimental Advanced Airborne Research. NASA heeft lidar geïdentificeerd als een sleuteltechnologie voor het mogelijk maken van autonome, nauwkeurige veilige landing van toekomstige robot- en bemande maanlandingsvoertuigen. |
| |
| De golflengten variëren naargelang het doel: van ongeveer 10 micrometer (infrarood) tot ongeveer 250 nm (UV). Doorgaans wordt licht gereflecteerd via terugverstrooiing, in tegenstelling tot pure reflectie die men zou kunnen vinden met een spiegel. Verschillende soorten verstrooiing worden gebruikt voor verschillende lidar-toepassingen: meestal Rayleigh-verstrooiing, Mie-verstrooiing, Raman-verstrooiing en fluorescentie. Geschikte combinaties van golflengten kunnen het op afstand in kaart brengen van atmosferische inhoud mogelijk maken door golflengteafhankelijke veranderingen in de intensiteit van het geretourneerde signaal te identificeren. De naam "fotonische radar" wordt soms gebruikt om afstandsbepaling met zichtbaar spectrum te betekenen, zoals lidar, hoewel fotonische radar strikter verwijst naar radiofrequentiebereikbepaling met behulp van fotonica-componenten |
|
|
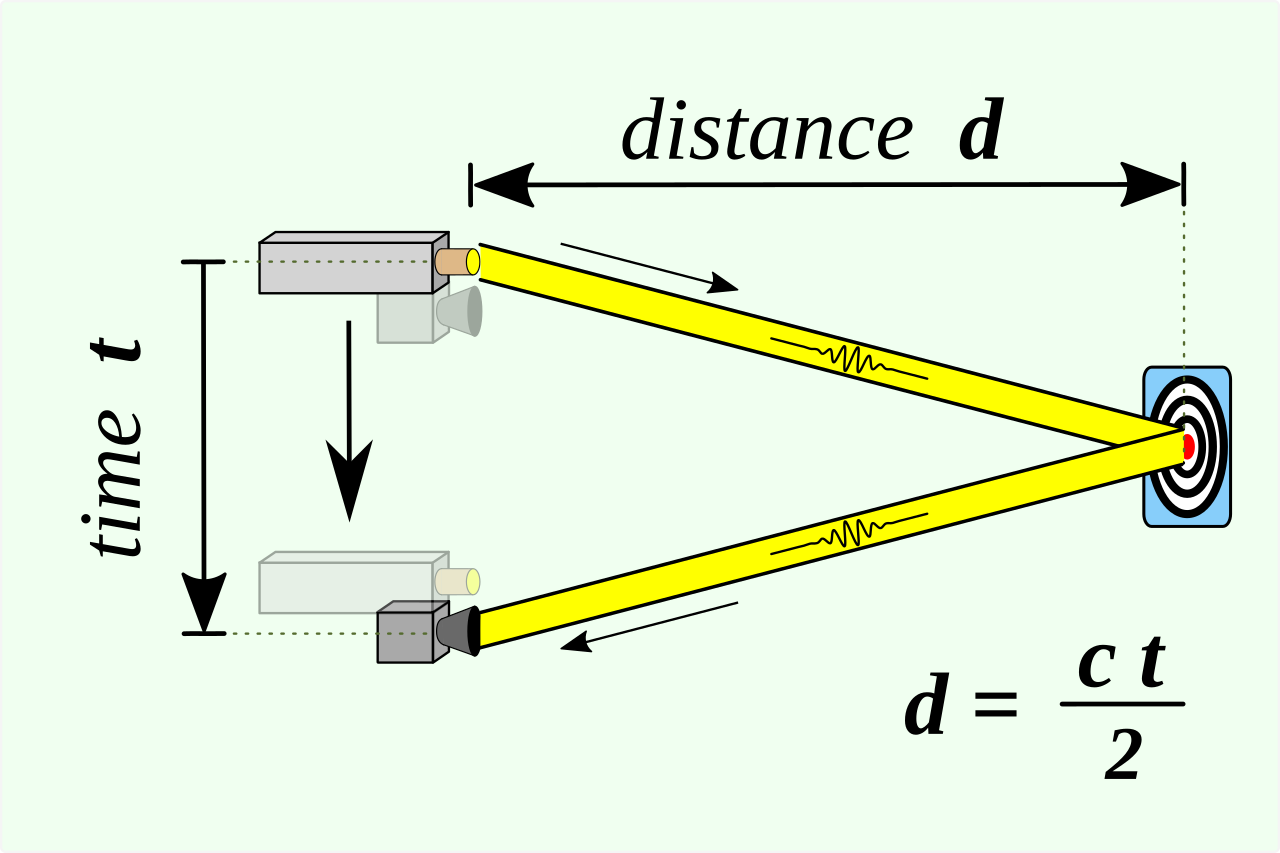
| Basis principe van de vliegtijd toegepast op laserafstandsmeting |
|
|
|
|
|
De twee soorten lidar-detectieschema's zijn "incoherente" of directe energiedetectie (die voornamelijk amplitudeveranderingen van het
gereflecteerde licht meet) en coherente detectie (het beste voor het meten van Doppler-verschuivingen of veranderingen in de fase van het gereflecteerde licht). Coherente systemen gebruiken over het algemeen optische heterodyne detectie. Dit is gevoeliger dan directe detectie en stelt hen in staat om op veel lager vermogen te werken, maar vereist complexere transceivers. |
| |
Beide typen gebruiken pulsmodellen: ofwel micropulse of hoge energie. Micropulssystemen maken gebruik van intermitterende uitbarstingen van energie. Ze ontwikkelden zich als gevolg van het steeds toenemende computervermogen, gecombineerd met de vooruitgang in lasertechnologie.
Ze gebruiken aanzienlijk minder energie in de laser, meestal in de orde van één microjoule, en zijn vaak "oogveilig", wat betekent dat ze zonder veiligheidsmaatregelen kunnen worden gebruikt. Krachtige systemen zijn gebruikelijk in atmosferisch onderzoek, waar ze veel worden gebruikt voor het meten van atmosferische parameters: de hoogte, gelaagdheid en dichtheden van wolken, eigenschappen van wolkendeeltjes (extinctiecoëfficiënt, terugverstrooiingscoëfficiënt, depolarisatie), temperatuur, druk, wind, vochtigheid, en sporengasconcentratie (ozon, methaan, lachgas, enz.). |
|
| Componenten |
| Lidar-systemen bestaan uit verschillende hoofdcomponenten. |
| |
| Laser |
| 600-1000 nm lasers komen het meest voor voor niet-wetenschappelijke toepassingen. Het maximale vermogen van de laser is beperkt, of er wordt een automatisch uitschakelsysteem gebruikt dat de laser op bepaalde hoogten uitschakelt om het oogveilig te maken voor de mensen op de grond. |
| |
Een veelgebruikt alternatief, lasers van 1550 nm, zijn oogveilig bij relatief hoge vermogensniveaus,
omdat deze golflengte niet sterk door het oog wordt geabsorbeerd, maar de detectortechnologie is minder geavanceerd en daarom worden deze golflengten over het algemeen gebruikt op grotere afstanden met lagere nauwkeurigheid. Ze worden ook gebruikt voor militaire toepassingen omdat 1550 nm niet zichtbaar is in nachtkijkers, in tegenstelling tot de kortere 1000 nm infraroodlaser. |
| |
| Lidars voor topografische kaarten in de lucht gebruiken over het algemeen 1064 nm diode-gepompte YAG-lasers, terwijl bathymetrische (onderwaterdiepte-onderzoek) systemen over het algemeen 532 nm frequentie-verdubbelde diode-gepompte YAG-lasers gebruiken omdat 532 nm water doordringt met veel minder demping dan 1064 nm. Laserinstellingen omvatten de laserherhalingssnelheid (die de snelheid van gegevensverzameling regelt). |
| |
| Pulslengte is over het algemeen een attribuut van de lengte van de laserholte, het aantal benodigde passages door het versterkingsmateriaal (YAG, YLF, enz.) en Q-switch (pulserende) snelheid. Een betere doelresolutie wordt bereikt met kortere pulsen, op voorwaarde dat de lidar-ontvangerdetectoren en elektronica voldoende bandbreedte hebben. |
|
| |
| Fhased arrays |
Een phased array kan elke richting verlichten door gebruik te maken van een microscopische array van individuele antennes. Door de timing (fase) van elke antenne te regelen, wordt een samenhangend
signaal in een specifieke richting gestuurd |
| |
| Gefaseerde arrays worden sinds de jaren veertig in radar gebruikt. Dezelfde techniek kan worden gebruikt met licht. In de orde van een miljoen optische antennes worden gebruikt om een stralingspatroon van een bepaalde grootte in een bepaalde richting te zien. Het systeem wordt bestuurd door de timing van de precieze flits. |
|
|
|
 |
| Het besturingssysteem kan de vorm van de lens veranderen om in- en uitzoomen mogelijk te maken. Specifieke subzones kunnen worden getarget met intervallen van minder dan een seconde. Elektromechanische lidar gaat tussen de 1.000 en 2.000 uur mee. Daarentegen kan solid-state lidar 100.000 uur werken. |
| |
| Micro-elektromechanische spiegels |
Micro-elektromechanische spiegels (MEMS) zijn niet volledig in vaste toestand. Hun kleine vormfactor biedt echter veel van dezelfde kostenvoordelen. Een enkele laser wordt gericht op een enkele spiegel die kan worden geheroriënteerd om elk deel van het doelveld te bekijken. De spiegel draait in hoog tempo rond. MEMS-systemen werken echter over het algemeen in een enkel vlak (van links naar rechts). Om een tweede dimensie toe te voegen, is over het algemeen een tweede spiegel nodig die op en neer beweegt. Als alternatief kan een andere laser dezelfde spiegel vanuit een andere hoek raken. MEMS-systemen kunnen worden verstoord door schokken/trillingen en moeten mogelijk herhaald worden gekalibreerd. Het doel is om een kleine microchip te creëren om innovatie en verdere technologische vooruitgang te bevorderen. |
| |
| Scanner en optiek |
| De ontwikkelingssnelheid van afbeeldingen wordt beïnvloed door de snelheid waarmee ze worden gescand. Opties om de azimut en hoogte te scannen zijn onder meer dubbele oscillerende vlakke spiegels, een combinatie met een polygoonspiegel en een scanner met twee assen. Optische keuzes zijn van invloed op de hoekresolutie en het bereik dat kan worden gedetecteerd.
Een gatenspiegel of een straalsplitser zijn mogelijkheden om een retoursignaal op te vangen. |
| |
| Fotodetector en ontvangerelektronica |
| In lidar worden twee belangrijke fotodetectortechnologieën gebruikt: halfgeleiderfotodetectoren, zoals siliciumlawine-fotodiodes of fotomultiplicatoren. De gevoeligheid van de ontvanger is een andere parameter die in een lidar-ontwerp moet worden afgewogen. |
| |
| Positie- en navigatiesystemen |
| Lidarsensoren die op mobiele platforms zoals vliegtuigen of satellieten zijn gemonteerd, hebben instrumenten nodig om de absolute positie en oriëntatie van de sensor te bepalen.
Dergelijke apparaten bevatten over het algemeen een Global Positioning System-ontvanger en een traagheidsmeeteenheid (IMU). |
| |
| Sensors |
| Lidar maakt gebruik van actieve sensoren die hun eigen lichtbron leveren. De energiebron raakt objecten en de gereflecteerde energie wordt gedetecteerd en gemeten door sensoren. De afstand tot het object wordt bepaald door de tijd tussen uitgezonden en terugverstrooide pulsen te registreren en door de lichtsnelheid te gebruiken om de afgelegde afstand te berekenen. Flash LIDAR maakt 3D-beeldvorming mogelijk vanwege het vermogen van de camera om een grotere flits uit te zenden en de ruimtelijke relaties en afmetingen van het interessegebied met de geretourneerde energie te voelen. Dit zorgt voor nauwkeurigere beeldvorming omdat de vastgelegde frames niet aan elkaar hoeven te worden genaaid en het systeem niet gevoelig is voor platformbeweging. Dit resulteert in minder vervorming. |
| |
| 3D-beeldvorming kan worden bereikt met zowel scan- als niet-scansystemen. "3-D gated viewing laserradar" is een niet-scannend laserbereiksysteem dat een gepulseerde laser en een snelle gated camera toepast. Er is onderzoek gestart naar virtuele straalbesturing met behulp van Digital Light Processing (DLP) -technologie. |
| |
| Beeldvorming lidar kan ook worden uitgevoerd met behulp van arrays van hogesnelheidsdetectoren en modulatiegevoelige detectorarrays die typisch zijn gebouwd op enkele chips met behulp van complementaire metaal-oxide-halfgeleider (CMOS) en hybride CMOS / Charge-coupled device (CCD) fabricagetechnieken. In deze apparaten voert elke pixel enige lokale verwerking uit, zoals demodulatie of poorten met hoge snelheid, waarbij de signalen worden gedownconverteerd naar videosnelheid, zodat de array kan worden gelezen als een camera. Met behulp van deze techniek kunnen vele duizenden pixels/kanalen tegelijkertijd worden verkregen. Hoge resolutie 3D lidar camera's gebruiken homodyne detectie met een elektronische CCD of CMOS sluiter. |
| |
| Een coherente beeldvormende lidar maakt gebruik van heterodyne detectie van synthetische arrays om een starende ontvanger met één element in staat te stellen te handelen alsof het een beeldarray is. |
| |
| In 2014 kondigde Lincoln Laboratory een nieuwe beeldvormingschip aan met meer dan 16.384 pixels, die elk een enkel foton kunnen afbeelden, waardoor ze een groot gebied in een enkel beeld kunnen vastleggen. Een enkele passage door een zakenvliegtuig op 3000 meter boven Port-au-Prince kon onmiddellijk snapshots maken van 600 meter pleinen van de stad met een resolutie van 30 centimeter, waarbij de exacte hoogte werd weergegeven puin in de straten van de stad. Het nieuwe systeem is tien keer beter en zou sneller veel grotere kaarten kunnen produceren. De chip maakt gebruik van indium galliumarsenide (InGaAs), dat werkt in het infraroodspectrum op een relatief lange golflengte, wat een hoger vermogen en een groter bereik mogelijk maakt. In veel toepassingen, zoals zelfrijdende auto's, zal het nieuwe systeem de kosten verlagen doordat er geen mechanisch onderdeel nodig is om de chip te richten. InGaAs gebruikt minder gevaarlijke golflengten dan conventionele siliciumdetectoren, die werken op visuele golflengten. |
|
| |
|
Flitsende LIDAR |
| In flash lidar wordt het hele gezichtsveld verlicht met een brede divergerende laserstraal in een enkele puls. Dit in tegenstelling tot conventionele scanning lidar, die een gecollimeerde laserstraal gebruikt die een enkel punt tegelijk verlicht, en de straal wordt raster gescand om het gezichtsveld punt voor punt te verlichten. Deze belichtingsmethode vereist ook een ander detectieschema. Bij zowel scanning als flash-lidar wordt een time-of-flight-camera gebruikt om informatie te verzamelen over zowel de 3D-locatie als de intensiteit van het licht dat erop valt in elk frame. Bij het scannen van lidar bevat deze camera echter alleen een puntsensor, terwijl in flitslidar de camera ofwel een 1-D of een 2D-sensorarray bevat, waarvan elke pixel 3D-locatie- en intensiteitsinformatie verzamelt. In beide gevallen wordt de diepte-informatie verzameld met behulp van de vluchttijd van de laserpuls (dwz de tijd die elke laserpuls nodig heeft om het doel te raken en terug te keren naar de sensor), waarvoor het pulseren van de laser en acquisitie door de camera te synchroniseren. Het resultaat is een camera die foto's van afstand maakt in plaats van kleuren. Flash-lidar is vooral voordelig in vergelijking met het scannen van lidar, wanneer de camera, scène of beide bewegen, omdat de hele scène tegelijkertijd wordt verlicht. Met het scannen van lidar kan beweging "jitter" veroorzaken van het tijdverloop wanneer de laser over de scène rastert. |
| |
| Zoals met alle vormen van lidar, maakt de ingebouwde verlichtingsbron flitslidar een actieve sensor. Het signaal dat wordt teruggestuurd, wordt verwerkt door ingebouwde algoritmen om een bijna onmiddellijke 3D-weergave van objecten en terreinkenmerken binnen het gezichtsveld van de sensor te produceren. De herhalingsfrequentie van de laserpuls is voldoende voor het genereren van 3D-video's met een hoge resolutie en nauwkeurigheid. De hoge framesnelheid van de sensor maakt het een handig hulpmiddel voor een verscheidenheid aan toepassingen die profiteren van realtime visualisatie, zoals zeer nauwkeurige landingsoperaties op afstand. Door onmiddellijk een 3D-elevatiemaas van doellandschappen te retourneren, kan een flitssensor worden gebruikt om optimale landingszones te identificeren in scenario's voor het landen van autonome ruimtevaartuigen. |
| |
Kijken op afstand vereist een krachtige lichtstraal. De kracht is beperkt tot niveaus die het menselijk netvlies niet beschadigen. Golflengten mogen
de menselijke ogen niet beïnvloeden. Goedkope siliciumbeeldsensoren lezen echter geen licht in het oogveilige spectrum. In plaats daarvan zijn gallium-arsenide-imagers vereist, wat de kosten kan opdrijven tot $ 200.000.[28] Gallium-arsenide is dezelfde verbinding die wordt gebruikt om dure, zeer efficiënte zonnepanelen te produceren die gewoonlijk worden gebruikt in ruimtevaarttoepassingen |
| Gebaseerd op oriëntatie |
| Lidar kan worden gericht op het nadir, zenit of lateraal. Lidar-hoogtemeters kijken bijvoorbeeld naar beneden, een atmosferische lidar kijkt omhoog en op lidar gebaseerde botsingsvermijdingssystemen kijken van opzij. |
| |
| Gebaseerd op scanmechanisme |
| Laserprojecties van lidars kunnen worden gemanipuleerd met behulp van verschillende methoden en mechanismen om een scaneffect te produceren: het standaard spiltype, dat draait om een 360-gradenbeeld te geven; solid-state lidar, die een vast gezichtsveld heeft, maar geen bewegende delen, en die ofwel MEMS ofwel optische phased arrays kan gebruiken om de bundels
te sturen; en flitslidar, die een lichtflits verspreidt over een groot gezichtsveld voordat het signaal terugkaatst naar een detector. |
| |
| Gebaseerd op platform |
| Lidartoepassingen kunnen worden onderverdeeld in typen op het land en in de lucht De twee typen vereisen scanners met verschillende specificaties op basis van het doel van de gegevens,
de grootte van het vast te leggen gebied, het gewenste meetbereik, de kosten van apparatuur en meer. Platforms in de ruimte zijn ook mogelijk, zie satellietlaserhoogtemeting. |
| In de lucht |
| Lidar in de lucht (ook laserscanning in de lucht) is wanneer een laserscanner, terwijl hij tijdens de vlucht aan een vliegtuig is bevestigd, een 3D-puntenwolkmodel van het landschap maakt. Dit is momenteel de meest gedetailleerde en nauwkeurige methode voor het maken van digitale hoogtemodellen, ter vervanging van fotogrammetrie. Een groot voordeel in vergelijking met fotogrammetrie is de mogelijkheid om reflecties van vegetatie uit het puntenwolkmodel te filteren om een digitaal terreinmodel te creëren dat grondoppervlakken weergeeft, zoals rivieren, paden, cultureel erfgoed, enz., die verborgen zijn door bomen. Binnen de categorie van lidar in de lucht wordt soms onderscheid gemaakt tussen toepassingen op grote hoogte en toepassingen op lage hoogte, maar het belangrijkste verschil is een vermindering van zowel de nauwkeurigheid als de puntdichtheid van gegevens die op grotere hoogte zijn verkregen. Lidar in de lucht kan ook worden gebruikt om bathymetrische modellen in ondiep water te maken. |
| |
| De belangrijkste bestanddelen van lidar in de lucht zijn onder meer digitale hoogtemodellen (DEM) en digitale oppervlaktemodellen (DSM). De punten en grondpunten zijn de vectoren van discrete punten, terwijl DEM en DSM geïnterpoleerde rasterrasters van discrete punten zijn. Het proces omvat ook het vastleggen van digitale luchtfoto's. Om diepgewortelde aardverschuivingen te interpreteren, bijvoorbeeld onder de dekking van vegetatie, steile hellingen, spanningsscheuren of omgevallen bomen, wordt lidar in de lucht gebruikt. Lidar digitale hoogtemodellen in de lucht kunnen door het bladerdak van bosbedekking kijken, gedetailleerde metingen uitvoeren van steile hellingen, erosie en kantelen van elektrische palen. |
| |
| Lidar-gegevens in de lucht worden verwerkt met behulp van een toolbox genaamd Toolbox for Lidar Data Filtering and Forest Studies (TIFFS) voor lidar-gegevensfiltering en terreinstudiesoftware. Met behulp van de software worden de gegevens geïnterpoleerd naar digitale terreinmodellen. De laser wordt gericht op het in kaart te brengen gebied en de hoogte van elk punt boven de grond wordt berekend door de oorspronkelijke z-coördinaat af te trekken van de corresponderende digitale terreinmodelhoogte. Op basis van deze hoogte boven de grond worden de niet-vegetatiegegevens verkregen, waaronder objecten zoals gebouwen, elektriciteitsleidingen, vliegende vogels, insecten, enz. De rest van de punten wordt behandeld als vegetatie en gebruikt voor modellering en kartering. Binnen elk van deze plots worden lidar-statistieken berekend door statistieken te berekenen zoals gemiddelde, standaarddeviatie, scheefheid, percentielen, kwadratisch gemiddelde, enz. |
|
| Lidar bathymetrie in de lucht |
| Het bathymetrische technologiesysteem van lidar in de lucht omvat het meten van de vluchttijd van een signaal van een bron tot zijn terugkeer naar de sensor. De data-acquisitietechniek omvat een component voor het in kaart brengen van de zeebodem en een component voor grondwaarheid die videotransecten en bemonstering omvat. Het werkt met behulp van een groen spectrum (532 nm) laserstraal. Twee bundels worden geprojecteerd op een snel roterende spiegel, die een reeks punten creëert. Een van de stralen dringt het water in en detecteert onder gunstige omstandigheden ook het bodemoppervlak van het water. |
| |
| De verkregen gegevens tonen de volledige omvang van het landoppervlak dat boven de zeebodem is blootgesteld. Deze techniek is uiterst nuttig omdat het een belangrijke rol zal spelen in het grote programma voor het in kaart brengen van de zeebodem. De kartering levert zowel onshore topografie als onderwaterhoogten op. Weerspiegeling van de zeebodem is een ander oplossingsproduct van dit systeem dat kan helpen bij het in kaart brengen van onderwaterhabitats. Deze techniek is gebruikt voor het driedimensionaal in kaart brengen van afbeeldingen van de wateren van Californië met behulp van een hydrografische lidar. Lidar-scanning uitgevoerd met een multicopter UAV. |
| |
| Drones worden nu gebruikt met laserscanners, evenals andere sensoren op afstand, als een meer economische methode om kleinere gebieden te scannen. De mogelijkheid van drone-remote sensing elimineert ook elk gevaar waaraan vliegtuigbemanningen kunnen worden blootgesteld in moeilijk terrein of afgelegen gebieden. |
| |
| Full-waveform Lidar |
Airborne LiDAR-systemen waren traditioneel in staat om slechts een paar piekopbrengsten te behalen, terwijl recentere systemen het volledige gereflecteerde signaal verwerven en digitaliseren. Wetenschappers analyseerden het golfvormsignaal voor het extraheren van piekrendementen met behulp van Gaussiaanse ontbinding. Zhuang et al, 2017 gebruikten deze benadering voor het schatten van bovengrondse biomassa. Het is moeilijk om met de enorme hoeveelheden full-waveform data om te gaan. Daarom is Gaussiaanse ontleding van de golfvormen effectief, omdat het de gegevens vermindert en wordt ondersteund door bestaande workflows die de interpretatie van 3D-puntenwolken ondersteunen.
Recente studies hebben voxelisatie onderzocht. De intensiteiten van de golfvormmonsters worden ingevoegd in een voxelized ruimte (d.w.z. 3D-grijswaardenafbeelding) waardoor een 3D-weergave van het gescande gebied ontstaat. Gerelateerde statistieken en informatie kunnen vervolgens worden geëxtraheerd uit die voxelized ruimte. Structurele informatie kan worden geëxtraheerd met behulp van 3D-metrieken uit lokale gebieden en er is een casestudy die de voxelisatiebenadering gebruikte voor het detecteren van dode staande eucalyptusbomen in Australië. |
|
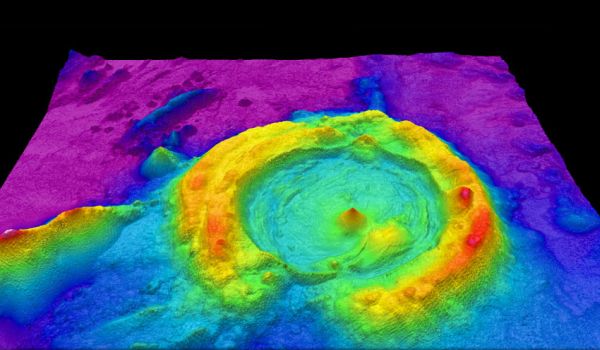 |
| Hoge resolutie multibeam lidar-kaart met spectaculair defecte en vervormde zeebodemgeologie, in gearceerd reliëf en gekleurd door diepte. |
|
|
 |
| Lidar-scanning uitgevoerd met een UAV met meerdere vliegtuigen. |
|
| Terrestrisch |
Terrestrische toepassingen van lidar of terrestrische laserscanning vinden plaats op het aardoppervlak en kunnen stationair of mobiel zijn.
Stationair terrestrisch scannen is het meest gebruikelijk als onderzoeksmethode, bijvoorbeeld in conventionele topografie, monitoring, documentatie van cultureel erfgoed en forensisch onderzoek. De 3D-puntenwolken die van dit soort scanners zijn verkregen, kunnen worden vergeleken met digitale afbeeldingen die van het gescande gebied vanaf de locatie van de scanner zijn genomen om in relatief korte tijd realistisch ogende 3D-modellen te creëren in vergelijking met andere technologieën. Elk punt in de puntenwolk krijgt de kleur van de pixel van de afbeelding die is genomen op dezelfde locatie en richting als de laserstraal die het punt heeft gecreëerd. |
| |
Mobiele lidar (ook wel mobiel laserscannen) is wanneer twee of meer scanners aan een bewegend voertuig zijn bevestigd om gegevens langs een
pad te verzamelen. Deze scanners zijn bijna altijd gekoppeld aan andere soorten apparatuur, waaronder GNSS-ontvangers en IMU's.
Een voorbeeldtoepassing is het inmeten van straten, waarbij rekening moet worden gehouden met hoogspanningsleidingen, exacte brughoogten, aangrenzende bomen, etc. In plaats van elk van deze metingen afzonderlijk in het veld te verzamelen met een tachymeter, kan een 3D-model van een puntenwolk worden gemaakt waarin alle benodigde metingen kunnen worden gedaan, afhankelijk van de kwaliteit van de verzamelde gegevens. Dit elimineert het probleem van vergeten een meting uit te voeren, zolang het model beschikbaar en betrouwbaar is en een passend nauwkeurigheidsniveau heeft. |
| |
| Terrestrische lidar-mapping omvat een proces van het genereren van bezettingsrasterkaarten. Het proces omvat een reeks cellen verdeeld in rasters die een proces gebruiken om de hoogtewaarden op te slaan wanneer lidar-gegevens in de respectieve rastercel vallen. Een binaire kaart wordt vervolgens gemaakt door een bepaalde drempel toe te passen op de celwaarden voor verdere verwerking. De volgende stap is om de radiale afstand en z-coördinaten van elke scan te verwerken om te bepalen welke 3D-punten overeenkomen met elk van de gespecificeerde rastercellen die leiden tot het proces van gegevensvorming. |
|
| Er is een grote verscheidenheid aan lidar-applicaties, naast de onderstaande applicaties, zoals het vaak wordt genoemd in nationale lidar-datasetprogramma's. Deze toepassingen worden grotendeels bepaald door het bereik van effectieve objectdetectie; resolutie, dat is hoe nauwkeurig de lidar objecten identificeert en classificeert; en reflectieverwarring, wat betekent hoe goed de lidar iets kan zien in de aanwezigheid van heldere objecten, zoals reflecterende tekens of felle zon. |
| |
| Landbouw |
Landbouwrobots zijn gebruikt voor een verscheidenheid aan doeleinden, variërend van zaad- en meststofverspreiding, detectietechnieken en gewasverkenning voor de taak van onkruidbestrijding. Lidar kan helpen bepalen waar kostbare kunstmest moet worden aangebracht. Het kan een topografische kaart van de velden maken en hellingen en blootstelling aan de zon van de landbouwgrond onthullen. Onderzoekers van de Dienst Landbouwkundig Onderzoek gebruikten deze topografische gegevens met de resultaten van de landbouwgrondopbrengsten van
voorgaande jaren om land in te delen in zones met een hoge, gemiddelde of lage opbrengst. Dit geeft aan waar kunstmest moet worden aangebracht om de
opbrengst te maximaliseren. |
| |
| Lidar wordt nu gebruikt om insecten in het veld te volgen. Het gebruik van Lidar kan de beweging en het gedrag van individuele vliegende insecten detecteren, met identificatie tot op geslacht en soort. In 2017 is in de Verenigde Staten, Europa en China een patentaanvraag op deze technologie gepubliceerd. Een andere toepassing is het in kaart brengen van gewassen in boomgaarden en wijngaarden, om bladgroei en de noodzaak van snoeien of ander onderhoud te detecteren, variaties in de fruitproductie te detecteren of planten te tellen. |
| |
| Lidar is handig in situaties waarin GNSS wordt geweigerd, zoals in noten- en fruitboomgaarden, waar gebladerte satellietsignalen naar precisielandbouwapparatuur of een tractor zonder bestuurder blokkeert. Lidarsensoren kunnen de randen van rijen detecteren, zodat landbouwapparatuur kan blijven bewegen totdat het GNSS-signaal is hersteld. |
| |
| Classificatie van plantensoorten |
Om onkruid te bestrijden, moeten plantensoorten worden geïdentificeerd. Dit kan worden gedaan door 3D-lidar en machine learning te gebruiken. Lidar produceert plantcontouren als een "puntenwolk" met bereik- en reflectiewaarden. Deze gegevens worden getransformeerd en er worden kenmerken uit gehaald. Als de soort bekend is, worden de kenmerken als nieuwe gegevens toegevoegd. De soort is gelabeld en de kenmerken
ervan worden in eerste instantie opgeslagen als voorbeeld om de soort in de echte omgeving te identificeren. Deze methode is efficiënt omdat het een lidar met lage resolutie en begeleid leren gebruikt. Het bevat een eenvoudig te berekenen functieset met algemene statistische kenmerken die onafhankelijk zijn van de plantgrootte. |
| |
| Archeologie |
Lidar heeft veel toepassingen in de archeologie, waaronder het plannen van veldcampagnes, het in kaart brengen van kenmerken onder het
bladerdak en een overzicht van brede, doorlopende kenmerken die niet van de grond te onderscheiden zijn. Lidar kan snel en goedkoop datasets
met een hoge resolutie produceren. Van Lidar afgeleide producten kunnen eenvoudig worden geïntegreerd in een Geografisch Informatie Systeem (GIS) voor analyse en interpretatie. |
| |
Lidar kan ook helpen bij het maken van digitale hoogtemodellen met hoge resolutie (DEM's) van archeologische vindplaatsen die microtopografie kunnen onthullen die anders verborgen is door vegetatie. De intensiteit van het geretourneerde lidarsignaal kan worden gebruikt om kenmerken te detecteren die zijn begraven onder vlakke begroeide oppervlakken zoals velden, vooral bij het
in kaart brengen met behulp van het infraroodspectrum. De aanwezigheid van deze kenmerken beïnvloedt de plantengroei en dus de hoeveelheid infrarood licht die wordt teruggekaatst.
In Fort Beauséjour - Fort Cumberland National Historic Site, Canada, ontdekte lidar bijvoorbeeld archeologische kenmerken die verband hielden met de belegering van het fort in 1755.
Kenmerken die niet konden worden onderscheiden op de grond of door middel van luchtfotografie werden geïdentificeerd door over elkaar liggende heuveltinten van de DEM gemaakt met kunstmatige verlichting vanuit verschillende hoeken. |
| |
| In 2012 werd lidar gebruikt om te zoeken naar de legendarische stad La Ciudad Blanca of "Stad van de Apengod" in de regio La Mosquitia van de Hondurese jungle. Tijdens een mappingperiode van zeven dagen werd bewijs gevonden van door de mens gemaakte constructies. In juni 2013 werd de herontdekking van de stad Mahendraparvata aangekondigd. |
| |
| In het zuiden van New England werd lidar gebruikt om stenen muren, funderingen van gebouwen, verlaten wegen en andere landschapskenmerken te onthullen die in luchtfotografie werden verduisterd door het dichte bladerdak van de regio. In Cambodja werden lidar-gegevens gebruikt door Damian Evans en Roland Fletcher om antropogene veranderingen in het Angkor-landschap
te onthullen |
| |
| In 2012 onthulde Lidar dat de Purépecha-nederzetting Angamuco in Michoacán, Mexico ongeveer evenveel gebouwen had als het huidige Manhattan; terwijl in 2016 het gebruik ervan bij het in kaart brengen van oude Maya-wegen in het noorden van Guatemala verhoogde wegen onthulde die de oude stad met elkaar verbond. van El Mirador naar andere sites. In 2018 ontdekten archeologen die lidar gebruikten meer dan 60.000 door mensen gemaakte bouwwerken in het Maya Biosphere Reserve, een "grote doorbraak" die aantoonde dat de Maya-beschaving veel
groter was dan eerder werd gedacht. |
| |
 |
| Deze mobiele robot gebruikt zijn lidar om een kaart
te bouwen en obstakels te ontwijken |
|
|
 |
| Cruise Automation zelfrijdende auto met vijf Velodyne LiDAR-units
op het dak. |
|
|
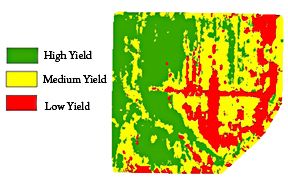 |
| Lidar wordt gebruikt om de opbrengst
op landbouwvelden te analyseren. |
|
| |
| Autonome voertuigen |
| Autonome voertuigen kunnen lidar gebruiken voor het opsporen en vermijden van obstakels om veilig door omgevingen te navigeren. De introductie van lidar was een cruciale gebeurtenis die de belangrijkste factor was achter Stanley, het eerste autonome voertuig dat de DARPA Grand Challenge met succes voltooide. Puntwolkenuitvoer van de lidarsensor levert de benodigde gegevens voor robotsoftware om te bepalen waar potentiële obstakels in de omgeving bestaan en waar de robot zich bevindt in relatie tot die potentiële obstakels. Singapore's Singapore-MIT Alliance for Research and Technology (SMART) is actief bezig met het ontwikkelen van technologieën voor autonome lidar-voertuigen. Voorbeelden van bedrijven die lidarsensoren produceren die vaak worden gebruikt in voertuigautomatisering, zijn Luminar, Ouster en Velodyne. De allereerste generaties adaptieve cruise control-systemen voor auto's gebruikten alleen lidarsensoren. |
| |
| Objectdetectie voor transportsystemen |
In transportsystemen is het essentieel om het voertuig en de omgeving te begrijpen om de veiligheid van voertuigen en passagiers te waarborgen en om elektronische systemen te ontwikkelen die bestuurdersassistentie bieden. Lidar-systemen spelen een belangrijke rol bij de veiligheid van transportsystemen. Veel elektronische systemen die bijdragen aan de rijhulp en voertuigveiligheid, zoals Adaptive Cruise Control (ACC), Emergency Brake Assist en Anti-lock Braking System (ABS), zijn afhankelijk van de detectie van de omgeving van een voertuig om autonoom of semi-autonoom te handelen. Dit wordt bereikt door het in kaart brengen en schatten van Lidar.
Basisoverzicht: Huidige lidarsystemen gebruiken roterende zeshoekige spiegels die de laserstraal splitsen. De bovenste drie balken worden gebruikt voor voertuigen en obstakels voor u en de onderste balken worden gebruikt om rijstrookmarkeringen en wegkenmerken te detecteren. Het grote voordeel van het gebruik van lidar is dat de ruimtelijke structuur wordt verkregen en
deze gegevens kunnen worden versmolten met andere sensoren zoals radar, enz. om een beter beeld te krijgen van de voertuigomgeving in termen van statische en dynamische eigenschappen van de in de omgeving aanwezige objecten. Omgekeerd is een belangrijk probleem met lidar de moeilijkheid bij het reconstrueren van puntenwolkgegevens bij slechte weersomstandigheden.
Bij zware regenval worden de lichtpulsen die door het lidarsysteem worden uitgezonden bijvoorbeeld gedeeltelijk gereflecteerd door regendruppels, wat ruis aan de gegevens toevoegt, 'echo's' genoemd.
Hieronder worden verschillende benaderingen genoemd om lidar-gegevens te verwerken en deze samen met gegevens van andere sensoren te gebruiken via sensorfusie om de omgevingscondities van het voertuig te detecteren |
 |
| Voorspelling van 3D-lasersysteem met behulp van een SICK LMC lidarsensor |
|
| |
| Obstakeldetectie en herkenning van de wegomgeving met behulp van lidar |
Deze methode richt zich niet alleen op objectdetectie en tracking, maar herkent ook rijstrookmarkeringen en wegkenmerken. Zoals eerder vermeld, gebruiken de lidarsystemen roterende zeshoekige spiegels die de laserstraal in zes stralen splitsen. De bovenste drie lagen worden gebruikt om voorwaartse objecten zoals voertuigen en bermobjecten te detecteren. De sensor is gemaakt van weerbestendig materiaal. De gegevens die door lidar worden gedetecteerd, worden geclusterd in verschillende segmenten en gevolgd door een Kalman-filter. Dataclustering wordt hier gedaan op basis van kenmerken van elk segment op basis van objectmodel, die verschillende objecten onderscheiden, zoals voertuigen, uithangborden, enz. Deze kenmerken omvatten de afmetingen van het object, enz. De reflectoren aan de achterkant van voertuigen worden gebruikt om voertuigen te onderscheiden van andere objecten. Het volgen van objecten wordt gedaan met behulp van een 2-traps Kalman-filter, rekening houdend met de stabiliteit van het volgen en de versnelde beweging van objecten. Gegevens van de reflecterende intensiteit van Lidar worden ook gebruikt voor detectie van stoepranden door gebruik te maken van robuuste regressie om occlusies op te lossen. De wegmarkering wordt gedetecteerd met
behulp van een aangepaste
Otsu-methode door onderscheid te maken tussen ruwe en glanzende oppervlakken. |
| |
| Biologie en conservering |
| Ook in de bosbouw heeft Lidar veel toepassingen gevonden. bladhoogte, biomassametingen en bladoppervlak kunnen allemaal worden bestudeerd met behulp van lidarsystemen in de lucht. Evenzo wordt lidar ook gebruikt door veel industrieën, waaronder energie en spoorwegen, en het ministerie van transport als een snellere manier van landmeten. Topografische kaarten kunnen ook gemakkelijk worden gegenereerd vanuit lidar, ook voor recreatief gebruik, zoals bij de productie van oriëntatiekaarten. Lidar is ook toegepast om de biodiversiteit van planten, schimmels en dieren te schatten en te beoordelen. |
| |
| Daarnaast heeft de Save the Redwoods League een project ondernomen om de hoge sequoia's aan de kust van Noord-Californië in kaart te brengen. Lidar stelt onderzoekers in staat om niet alleen de hoogte te meten van voorheen niet in kaart gebrachte bomen, maar ook om de biodiversiteit van het sequoiabos te bepalen. Stephen Sillett, die samenwerkt met de League aan het lidar-project aan de noordkust, beweert dat deze technologie nuttig zal zijn bij toekomstige inspanningen om oude sequoia's te behouden en te beschermen. |
|
| |
| Geologie en bodemkunde |
| Digitale hoogtekaarten met hoge resolutie gegenereerd door lucht- en stationaire lidar hebben geleid tot aanzienlijke vooruitgang in de geomorfologie (de tak van de geowetenschap die zich bezighoudt met de oorsprong en evolutie van de topografie van het aardoppervlak). De lidar-capaciteiten om subtiele topografische kenmerken te detecteren, zoals rivierterrassen en rivierkanaalbanken, ijzige landvormen, om de hoogte van het landoppervlak onder het bladerdak te meten, om ruimtelijke afgeleiden van hoogte beter op te lossen en om hoogteverschillen tussen herhalingen te detecteren onderzoeken hebben veel nieuwe studies mogelijk gemaakt van de fysische en chemische processen die landschappen vormen. In 2005 werd de Tour Ronde in het Mont Blanc-massief de eerste hoge alpiene berg waarop lidar werd gebruikt om het toenemende voorkomen van ernstige rotsval over grote rotswanden te volgen, naar verluidt veroorzaakt door klimaatverandering en degradatie van permafrost op grote hoogte. |
| |
| Lidar wordt ook gebruikt in structurele geologie en geofysica als een combinatie tussen lidar in de lucht en GNSS voor de detectie en studie van fouten, voor het meten van opheffing. De output van de twee technologieën kan extreem nauwkeurige hoogtemodellen voor terrein produceren - modellen die zelfs grondhoogte door bomen kunnen meten. Deze combinatie werd het meest gebruikt om de locatie van de Seattle Fault in Washington, Verenigde Staten te vinden. Deze combinatie meet ook de opwaartse kracht op Mount St. Helens door gebruik te maken van gegevens van voor en na de opwaartse kracht van 2004. Lidar-systemen in de lucht bewaken gletsjers en hebben het vermogen om subtiele hoeveelheden groei of achteruitgang te detecteren. Een op satellieten gebaseerd systeem, de NASA ICESat, bevat hiervoor een lidar-subsysteem. De NASA Airborne Topographic Mapper wordt ook veelvuldig gebruikt om gletsjers te volgen en analyses van kustveranderingen uit te voeren. De combinatie wordt ook gebruikt door bodemwetenschappers bij het maken van een bodemonderzoek. De gedetailleerde terreinmodellering stelt bodemwetenschappers in staat om hellingsveranderingen en landvormbreuken te zien die patronen in ruimtelijke relaties in de bodem aangeven. |
|
In eerste instantie, op basis van robijnlasers, werd lidar voor meteorologische toepassingen kort na de uitvinding van de laser geconstrueerd en
vormt een van de eerste toepassingen van lasertechnologie. Lidar-technologie is sindsdien enorm uitgebreid in capaciteit en lidar-systemen worden gebruikt om een reeks metingen uit te voeren, waaronder het profileren van wolken, het meten van wind, het bestuderen van aerosolen en het kwantificeren van verschillende atmosferische componenten. Atmosferische componenten kunnen op hun beurt nuttige informatie opleveren, waaronder oppervlaktedruk (door de opname van zuurstof of stikstof te meten), de uitstoot van broeikasgassen (kooldioxide en methaan), fotosynthese (kooldioxide), branden (koolmonoxide) en vochtigheid (waterdamp) . Atmosferische lidars kunnen op de grond, in de lucht of satelliet zijn, afhankelijk van het type meting. |
|
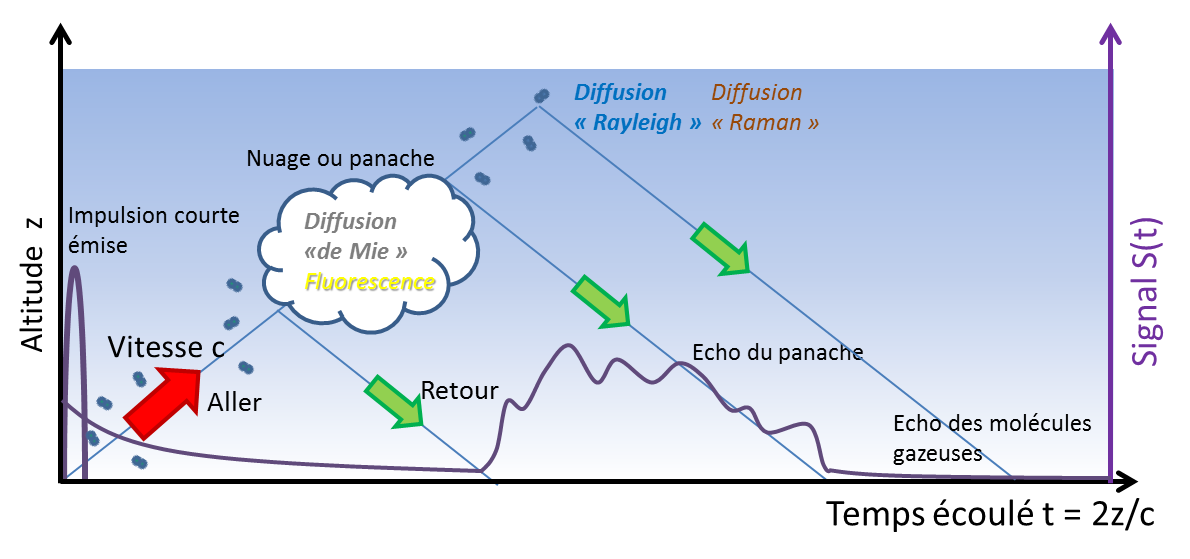 |
| Principe van atmosferische lidar. |
|
|
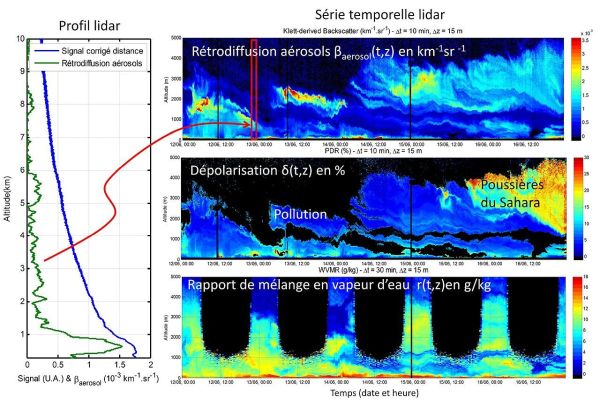 |
| Profiel en tijdreeksen verkregen met atmosferische lidar |
|
| |
| Atmosferische lidar remote sensing werkt op twee manieren: |
| |
| 1: door terugverstrooiing uit de atmosfeer te meten. |
| 2: door de verstrooide reflectie van de grond (wanneer de lidar in de lucht is) of een ander hard oppervlak te meten. |
| |
Terugverstrooiing vanuit de atmosfeer geeft direct een maat voor wolken en aerosolen. Andere afgeleide metingen van terugverstrooiing, zoals wind of cirrus-ijskristallen, vereisen een zorgvuldige selectie van de gedetecteerde golflengte en/of polarisatie. Doppler-lidar en Rayleigh Doppler-lidar worden gebruikt om temperatuur en/of windsnelheid langs de straal te meten door de frequentie van het terugverstrooide licht te meten.
De Doppler-verbreding van gassen in beweging maakt de bepaling van eigenschappen mogelijk via de resulterende frequentieverschuiving. Scanning lidars, zoals de conisch scannende NASA HARLIE LIDAR, zijn gebruikt om de atmosferische windsnelheid te meten. De ESA-windmissie ADM-Aeolus
zal worden uitgerust met een Doppler-lidarsysteem om globale metingen van verticale windprofielen te kunnen leveren. Tijdens de Olympische Zomerspelen van 2008 werd een doppler-lidarsysteem gebruikt om windvelden te meten tijdens de jachtcompetitie. |
| |
Doppler-lidarsystemen beginnen nu ook met succes te worden toegepast in de sector van hernieuwbare energie om gegevens over windsnelheid, turbulentie, windveer en windschering te verkrijgen. Er worden zowel pulserende als continue golfsystemen gebruikt. Gepulseerde systemen
gebruiken signaaltiming om verticale afstandsresolutie te verkrijgen, terwijl continue golfsystemen afhankelijk zijn van detector focussering. |
| |
| De term, eolics, is voorgesteld om de collaboratieve en interdisciplinaire studie van wind te beschrijven met behulp van computationele vloeistofmechanica-simulaties en Doppler-lidar-metingen |
| |
| De grondreflectie van een lidar in de lucht geeft een maat voor de oppervlaktereflectiviteit (ervan uitgaande dat de atmosferische transmissie bekend is) bij de lidar-golflengte, maar de grondreflectie wordt meestal gebruikt voor het maken van absorptiemetingen van de atmosfeer. "Differentiële absorptie lidar" (DIAL) metingen maken gebruik van twee of meer dicht bij elkaar liggende (<1 nm) golflengten om oppervlaktereflectie en andere transmissieverliezen buiten beschouwing te laten, aangezien deze factoren relatief ongevoelig zijn voor golflengte. Wanneer afgestemd op de juiste absorptielijnen van een bepaald gas, kunnen DIAL-metingen worden gebruikt om de concentratie (mengverhouding) van dat specifieke gas in de atmosfeer te bepalen. Dit wordt een Integrated Path Differential Absorption (IPDA) -benadering genoemd, omdat het een maat is voor de geïntegreerde absorptie langs het gehele lidar-pad. IPDA-lidars kunnen ofwel gepulseerd of CW zijn en gebruiken meestal twee of meer golflengten. IPDA-lidars zijn gebruikt voor teledetectie van kooldioxide en methaan. |
| |
| Synthetische array-lidar maakt beeldvorming van lidar mogelijk zonder dat een array-detector nodig is. Het kan worden gebruikt voor beeldvorming van Doppler-snelheidsmeting, ultrasnelle beeldsnelheid (MHz) en voor spikkelreductie in coherente lidar. Grant geeft een uitgebreide lidar-bibliografie voor atmosferische en hydrosferische toepassingen. |
| |
|
| Mijnbouw |
| Voor de berekening van ertsvolumes wordt gedaan door periodiek (maandelijks) te scannen in gebieden waar erts is verwijderd, en vervolgens oppervlaktegegevens te vergelijken met de vorige scan. Lidarsensoren kunnen ook worden gebruikt voor het opsporen en vermijden van obstakels voor robotachtige mijnbouwvoertuigen. |
| |
| Fysica en astronomie |
| Een wereldwijd netwerk van observatoria gebruikt lidars om de afstand tot reflectoren op de maan te meten, waardoor de positie van de maan tot op de millimeter nauwkeurig kan worden gemeten en de algemene relativiteitstheorie kan worden getest. MOLA, de Mars Orbiting Laser Altimeter, gebruikte een lidar-instrument in een om Mars draaiende satelliet (de NASA Mars Global Surveyor) om een spectaculair nauwkeurig globaal topografisch onderzoek van de rode planeet te maken. Laserhoogtemeters produceerden globale hoogtemodellen van Mars, de maan (Lunar Orbiter Laser Altimeter (LOLA)), Mercury (Mercury Laser Altimeter (MLA)), NEAR-Shoemaker Laser Rangefinder (NLR).[127] Toekomstige missies zullen ook experimenten met laserhoogtemeters omvatten, zoals de Ganymedes Laser Altimeter (GALA) als onderdeel van de Jupiter Icy Moons Explorer (JUICE) missie. |
| |
| In september 2008 gebruikte de NASA Phoenix Lander lidar om sneeuw in de atmosfeer van Mars te detecteren. |
| |
| In de atmosferische fysica wordt lidar gebruikt als een detectie-instrument op afstand om de dichtheid van bepaalde bestanddelen van de middelste en bovenste atmosfeer te meten, zoals kalium, natrium of moleculaire stikstof en zuurstof. Deze metingen kunnen worden gebruikt om temperaturen te berekenen. Lidar kan ook worden gebruikt om de windsnelheid te meten en om informatie te geven over de verticale verdeling van de aerosoldeeltjes. |
| |
Bij de onderzoeksfaciliteit voor kernfusie van JET, in het VK nabij Abingdon, Oxfordshire, wordt lidar Thomson-verstrooiing gebruikt om de profielen van elektronendichtheid en temperatuur van
het plasma te bepalen. |
_Globe.jpg) |
| In kaart brengen van Mars met behulp van de MOLA-lidar van de MGS-sonde |
|
|
 |
Lidar wordt gebruikt om opbrengstpercentages
op landbouwvelden te analyseren. |
|
| Gesteente |
Lidar wordt veel gebruikt in de gesteentemechanica voor de karakterisering van gesteenten en het detecteren van hellingen. Sommige eigenschappen zijn gebruikt om de geomechanische kwaliteit van de rotsmassa te beoordelen via de RMR-index. Bovendien, aangezien de oriëntaties van discontinuïteiten kunnen worden geëxtraheerd met behulp van de bestaande methodologieën, is het mogelijk om de geomechanische kwaliteit van een rotshelling te beoordelen aan de hand van de SMR-index. Bovendien stelt de vergelijking van verschillende
3D-puntenwolken van een helling die
op verschillende tijdstippen is verkregen, onderzoekers in staat de veranderingen te bestuderen die tijdens dit tijdsinterval op de scène worden geproduceerd als gevolg van steenslag of andere aardverschuivende processen. |
| |
| THOR |
| THOR is een laser die is ontworpen om de atmosferische omstandigheden op aarde te meten. De laser gaat een wolkendek binnen en meet de dikte van de terugkerende halo. De sensor heeft een glasvezelopening met een breedte van 7,5 inch die wordt gebruikt om het retourlicht te meten. |
| |
| Robotica |
Lidar-technologie wordt gebruikt in robotica voor de perceptie van de omgeving en objectclassificatie. Het vermogen van lidar-technologie om driedimensionale hoogtekaarten van het terrein, zeer nauwkeurige afstand tot de grond en naderingssnelheid te bieden, kan een veilige landing van robot- en bemande voertuigen mogelijk maken met een hoge mate van precisie. Lidar wordt ook veel gebruikt in robotica voor gelijktijdige
lokalisatie en mapping en goed geïntegreerd in robotsimulators. Raadpleeg de Militaire sectie hierboven voor meer voorbeelden. |
| |
| Ruimtevaart |
| Lidar wordt steeds vaker gebruikt voor afstandsbepaling en berekening van orbitale elementen van relatieve snelheid in nabijheidsoperaties en stationering van ruimtevaartuigen. Lidar is ook gebruikt voor atmosferische studies vanuit de ruimte. Korte pulsen van laserlicht die door een ruimtevaartuig worden uitgestraald, kunnen weerkaatsen op kleine deeltjes in de atmosfeer en terug naar een telescoop die is uitgelijnd met de laser van het ruimtevaartuig. Door de lidar-'echo' nauwkeurig te timen en door te meten hoeveel laserlicht door de telescoop wordt ontvangen, kunnen wetenschappers de locatie, verdeling en aard van de deeltjes nauwkeurig bepalen. Het resultaat is een revolutionair nieuw hulpmiddel voor het bestuderen van bestanddelen in de atmosfeer, van wolkendruppels tot industriële verontreinigende stoffen, die moeilijk op andere manieren te detecteren zijn. |
| |
| Laserhoogtemeting wordt gebruikt om digitale hoogtekaarten van planeten te maken, waaronder de Mars Orbital Laser Altimeter mapping van Mars, de Lunar Orbital Laser Altimeter en Lunar Altimeter mapping van de maan, en de Mercury Laser Altimeter mapping van Mercurius. Het wordt ook gebruikt om de helikopter Ingenuity te helpen navigeren tijdens zijn recordvluchten over het terrein van Mars. |
| |
| Landmeting |
| Lidar-sensoren in de lucht worden gebruikt door bedrijven op het gebied van teledetectie. Ze kunnen worden gebruikt om een DTM (Digital Terrain Model) of DEM (Digital Elevation Model) te maken; dit is vrij gebruikelijk voor grotere gebieden, aangezien een vliegtuig 3-4 km brede banen kan krijgen in een enkel viaduct. Een grotere verticale nauwkeurigheid van minder dan 50 mm kan worden bereikt met een lager viaduct, zelfs in bossen, waar het zowel de hoogte van het bladerdak als de grondhoogte kan aangeven. Meestal is een GNSS-ontvanger die is geconfigureerd via een controlepunt met georeferentie nodig om de gegevens te koppelen aan het WGS (World Geodetic System). |
| |
LiDAR wordt ook gebruikt bij hydrografisch onderzoek. Afhankelijk van de helderheid van het water kan LiDAR diepten meten van 0,9 m tot 40 m
met een verticale nauwkeurigheid van 15 cm en een horizontale nauwkeurigheid van 2,5 m. |
| |
| Bosbouw |
| Lidar-systemen zijn ook toegepast om het bosbeheer te verbeteren. Metingen worden gebruikt om bospercelen te inventariseren en om individuele boomhoogtes, kroonbreedte en kroondiameter te berekenen. Andere statistische analyses maken gebruik van lidar-gegevens om de totale plotinformatie te schatten, zoals het volume van het bladerdak, de gemiddelde, minimale en maximale hoogte en schattingen van de vegetatiebedekking. LiDAR vanuit de lucht is gebruikt om de bosbranden in Australië begin 2020 in kaart te brengen. De gegevens werden gemanipuleerd om kale aarde te bekijken en gezonde en verbrande vegetatie te identificeren. |
 |
Deze TomTom-kaartbus is uitgerust
met vijf lidarsensoren op de dakdrager. |
|
|
 |
Een puntenwolk gegenereerd door een rijdende auto met behulp van
een enkele Ouster OS1 lidar. |
|
| Vervoer |
Lidar is gebruikt in de spoorwegindustrie om rapporten over de gezondheid van activa te genereren voor activabeheer en door transportafdelingen om hun wegcondities te beoordelen. CivilMaps.com is een toonaangevend bedrijf op dit gebied. Lidar is gebruikt in adaptieve cruise control (ACC) systemen voor auto's. Systemen zoals die van Siemens, Hella, Ouster en Cepton gebruiken een lidar-apparaat dat aan de voorkant van het voertuig is gemonteerd, zoals de bumper, om de afstand tussen het voertuig en elk voertuig ervoor te bewaken. In het geval dat de voorligger vertraagt of
te dichtbij is, remt de ACC om de voorligger af te remmen. Als de weg vrij is, laat de ACC het voertuig accelereren tot een door de bestuurder ingestelde snelheid. Raadpleeg de Militaire sectie hierboven voor meer voorbeelden. De ceilometer, een op lidar gebaseerd apparaat, wordt op luchthavens over de hele wereld gebruikt om de hoogte van de bewolking op landingsbanen te meten |
| |
| Optimalisatie van windparken |
| Lidar kan worden gebruikt om de energie-output van windparken te verhogen door nauwkeurig windsnelheden en windturbulentie te meten. Experimentele lidarsystemen kunnen op de gondel van een windturbine worden gemonteerd of in de roterende spinner worden geïntegreerd om tegemoetkomende horizontale winden te meten, winden in het kielzog van de windturbine, en stel de bladen proactief af om componenten te beschermen en het vermogen te vergroten. Lidar wordt ook gebruikt om de invallende windbron te karakteriseren voor vergelijking met de productie van windturbines om de prestaties van de windturbine te verifiëren door de vermogenscurve van de windturbine te meten. Windparkoptimalisatie kan worden beschouwd als een onderwerp in toegepaste eolics. Een ander aspect van Lidar in de windgerelateerde industrie is het gebruik van computationele vloeistofdynamica over door Lidar gescande oppervlakken om het windpotentieel te beoordelen dat kan worden gebruikt voor optimale plaatsing van windparken. |
| |
| Optimalisatie van fotovoltaïsche zonne-energie |
Lidar kan ook worden gebruikt om planners en ontwikkelaars te helpen bij het optimaliseren van fotovoltaïsche zonne-energiesystemen op stadsniveau door geschikte daken te bepalen en om schaduwverliezen vast te stellen. Recente inspanningen op het gebied van laserscanning vanuit de lucht hebben zich gericht op manieren om de hoeveelheid zonlicht te schatten die op verticale gevels van gebouwen valt, of door meer gedetailleerde schaduwverliezen op te nemen door rekening te houden met de invloed van vegetatie en groter omringend terrein.
| |
| Alternatieve technologieën |
| Recente ontwikkeling van Structure From Motion (SFM)-technologieën maakt het mogelijk om 3D-beelden en kaarten te leveren op basis van gegevens die zijn geëxtraheerd uit visuele en IR-fotografie. De hoogte- of 3D-gegevens worden geëxtraheerd met behulp van meerdere parallelle passages over het in kaart gebrachte gebied, wat zowel visuele lichtbeelden als 3D-structuur oplevert van dezelfde sensor, die vaak een speciaal gekozen en gekalibreerde digitale camera is. Computer stereo vision is veelbelovend gebleken als een alternatief voor LiDAR voor toepassingen op korte afstand. |
| Bronnen: Wikipedia-fra, Wikipedia-en |
|
|
|
|
|
|
|












