|
|
|
| Een weerradar is een type radar dat in de meteorologie wordt gebruikt om neerslag te lokaliseren, de beweging ervan te berekenen en het type te bepalen (regen, sneeuw, hagel, enz.). De driedimensionale structuur van de verkregen gegevens maakt het ook mogelijk om de bewegingen van neerslag in de wolken af te leiden en zo te identificeren welke schade kunnen veroorzaken. Ten slotte kunnen we door neerslag als tracers te gebruiken de radiale richting en de snelheid van de wind in de lagere atmosfeer afleiden. |
| |
| Tijdens de Tweede Wereldoorlog merkten radaroperators dat ruis leek te komen van neerslag en werden technieken ontwikkeld om deze vervelende ruis weg te filteren. Wetenschappers erkenden echter snel het potentieel voor meteorologie en zodra het conflict eindigde, werden militaire radars ter beschikking gesteld voor het detecteren van neerslag. Tegenwoordig worden weerradars gebruikt door nationale weerdiensten, luchthavens, universitaire meteorologische onderzoeksafdelingen en zelfs televisiestations in hun dagelijkse nieuwsuitzendingen. |
| |
| De ruwe data van deze radars kunnen worden gebruikt om beelden te maken of worden verwerkt door gespecialiseerde software die hun beweging op korte termijn extrapoleert (onmiddellijke voorspelling). Hun informatie kan zelfs in NWP-modellen worden geladen om hun analyse van de weersituatie te verbeteren, waardoor ze betere voorspellingen kunnen doen. |
 |
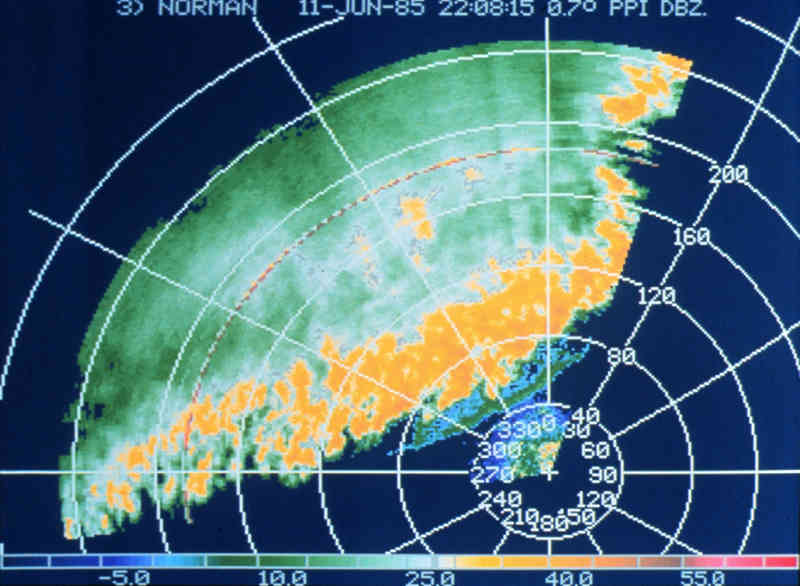
| Weerradar in Norman, Oklahoma met regenbuien |
|
|
 |
| Weerradar op de luchthaven van Dresden |
|
| In 1864 beschreef James Clerk Maxwell de wetten van het elektromagnetisme, waardoor het voor het eerst mogelijk was om aan hun bron te werken. In 1889 toonde Heinrich Rudolf Hertz aan dat elektromagnetische golven worden gereflecteerd door metalen oppervlakken. In de eerste decennia van de 20e eeuw hebben verschillende uitvinders, wetenschappers en ingenieurs uit verschillende landen bijgedragen aan de ontwikkeling van radar, net op tijd voor het begin van de Tweede Wereldoorlog. Tijdens het conflict merkten de operators van de microgolfradars van de geallieerde legers besmetting op die echo's bleken te zijn van neerslag (regen, sneeuw, enz.). Onmiddellijk na de oorlog zetten militaire wetenschappers, die al begonnen waren met hun onderzoek naar de gerapporteerde verschijnselen, hun werk in zowel het militaire als het burgerleven voort. |
| |
In de Verenigde Staten ontwikkelde David Atlas eerst voor de luchtmacht en later voor MIT, de eerste operationele weerradars. In Canada heeft J.S. Marshall en R.H. Douglas vormden de "Stormy Weather Group" in Montreal. Marshall en zijn doctoraalstudent Walter Palmer staan bekend om hun werk aan de verdeling van de druppelgrootte in regen op de middelste breedtegraad, wat leidde tot begrip van de Z-R-relatie, die een bepaalde radarreflectiviteit correleert met de snelheid waarmee regenwater valt.
In het Verenigd Koninkrijk bleef het onderzoek de radarechopatronen en weerselementen zoals stratiforme regen en convectieve wolken bestuderen, en werden experimenten uitgevoerd om het potentieel van verschillende golflengten van 1 tot 10 centimeter te evalueren. In 1950 demonstreerde het Britse bedrijf EKCO zijn 'wolk- en botsings-waarschuwingszoekradarapparatuur' in de lucht. |
| Tussen 1950 en 1980 werden reflectiviteitsradars, die positie en intensiteit van neerslag meten, ingebouwd door weerdiensten over de hele wereld. De vroege meteorologen moesten naar een kathodestraalbuis kijken. In 1953 deed Donald Staggs, een elektrotechnisch ingenieur die voor de Illinois State Water Survey werkte, de eerste geregistreerde radarwaarneming van een "haakecho" die verband hield met een tornadische onweersbui. |
|
|
 |
| Radaroperator van een oude weerradar |
|
| |
Het eerste gebruik van weerradar op televisie in de Verenigde Staten was in september 1961. Toen orkaan Carla de staat Texas naderde, maakte
de lokale verslaggever Dan Liever, die vermoedde dat de orkaan erg groot was, een reis naar het Amerikaanse weerbureau WSR-57 radarsite in Galveston om een idee te krijgen van de omvang van de storm. Hij overtuigde het bureaupersoneel om hem live vanuit hun kantoor te laten uitzenden en vroeg een meteoroloog om hem een ruwe schets van de Golf van Mexico te tekenen op een doorzichtig stuk plastic. Tijdens de uitzending hield hij die transparante overlay over het zwart-wit radarscherm van de computer om zijn publiek een idee te geven van zowel Carla's grootte als de locatie van het oog van de storm. Dit maakte eerder een nationale naam en zijn rapport hielp de gealarmeerde bevolking bij het accepteren van de evacuatie van naar schatting 350.000 mensen door de autoriteiten, wat op dat moment de grootste evacuatie in de Amerikaanse geschiedenis was. Dankzij de waarschuwing kwamen slechts 46 mensen om het leven en naar schatting heeft de evacuatie enkele duizenden levens gered, aangezien de kleinere Galveston-orkaan van 1900 naar schatting 6000-12000 mensen had gedood. |
| In de jaren zeventig begonnen radars te worden gestandaardiseerd en georganiseerd in netwerken. De eerste apparaten om radarbeelden vast te leggen werden ontwikkeld. Het aantal gescande hoeken werd vergroot om een driedimensionaal beeld van de neerslag te krijgen, zodat horizontale doorsneden (CAPPI) en verticale doorsneden konden worden gemaakt. Studies naar de organisatie van onweer waren toen mogelijk voor het Alberta Hail Project in Canada en het National Severe Storms Laboratory (NSSL) in de VS in het bijzonder. |
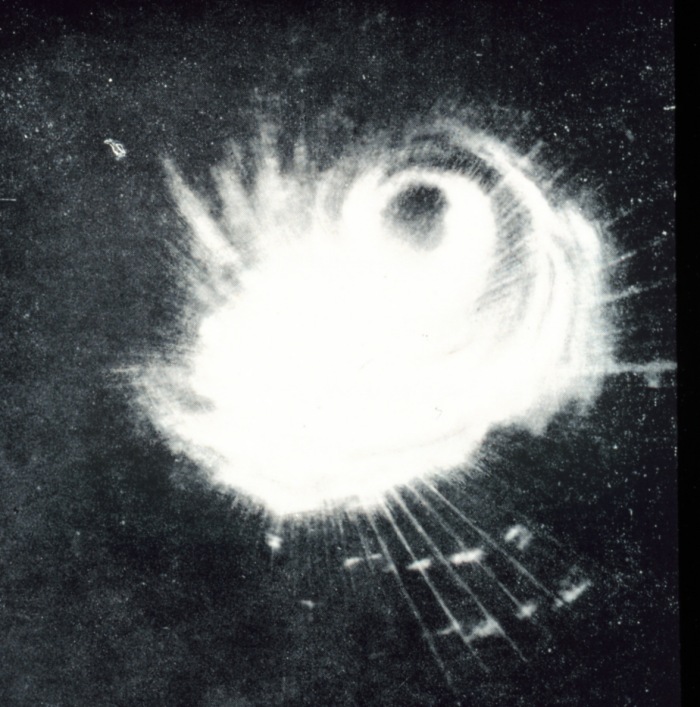 |
Typhoon Cobra op het radarscherm
van een schip in december 1944. |
|
|
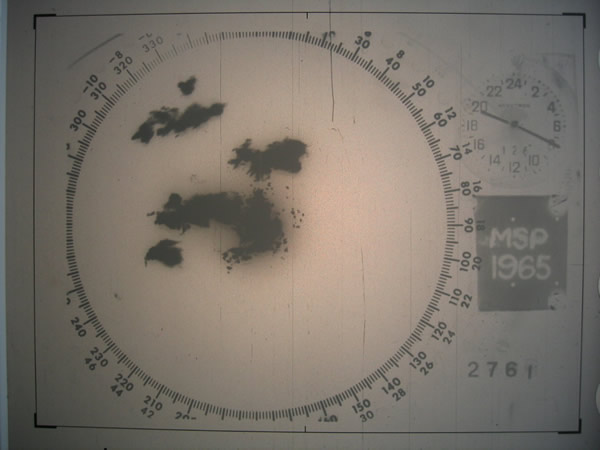 |
| Radartechnologie uit de jaren 60 detecteerde tornado producerende supercellen boven het grootstedelijk gebied Minneapolis-Saint Paul. |
|
|
 |
NEXRAD in South Dakota met een supercell
op de achtergrond. |
|
| |
| De NSSL, opgericht in 1964, begon te experimenteren met signalen met dubbele polarisatie en met het gebruik van Doppler-effecten. In mei 1973 verwoestte een tornado Union City, Oklahoma, net ten westen van Oklahoma City. Voor het eerst documenteerde een Dopplerized 10 cm golflengteradar van NSSL de hele levenscyclus van de tornado. De onderzoekers ontdekten een mesoschaalrotatie in de wolk in de lucht voordat de tornado de grond raakte - de tornadische vortex-signatuur. Het onderzoek van NSSL hielp de National Weather Service ervan te overtuigen dat Doppler-radar een cruciaal voorspellingsinstrument was. De superuitbraak van tornado's op 3-4 april 1974 en hun verwoestende vernietiging hebben misschien geholpen om financiering te krijgen voor verdere ontwikkelingen. |
| |
| Tussen 1980 en 2000 werden weerradarnetwerken wijdverbreid in Noord-Amerika, Europa, Japan en enkele andere landen. Conventionele radars worden vervangen door radars die niet alleen de intensiteit van de neerslag kunnen detecteren, maar ook de bewegingssnelheid (Doppler-effect). In de Verenigde Staten begon de installatie van deze 10 cm-golflengteradars, NEXRAD of WSR-88D genaamd, in 1988 en eindigde in de vroege jaren 1990. In Canada was de eerste Doppler-radar die van King City, ten noorden van Toronto in 1985. gebouwd om het concept te testen met een golflengte van 5 cm. De tweede is die van 10 cm van de McGill University in 1993. Het Canadese netwerk van meteorologische radars werd vanaf 1998 volledig gemoderniseerd. Frankrijk (ARAMIS-netwerk) en de andere Europese landen werden eind jaren negentig en na 2000 omgebouwd. In Australië , werden eind jaren negentig en begin jaren 2000 enkele zoekradars gebouwd, maar het duurde tot 2003 voordat een programma om het nationale netwerk te vernieuwen bepaalde locaties reserveerde voor radars met Doppler-functie. |
| |
| De duizelingwekkende ontwikkeling van IT maakt het mogelijk om radargegevens in realtime te verwerken om een veelvoud aan directe producten (CAPPI, PPI, cumulatieve neerslag, enz.) windstoten onder de wolken, enz.) en om hun beweging op korte termijn te voorspellen. |
| |
Na 2000 begint het onderzoek dat is gedaan naar de dubbele polarisatie van het radarsignaal praktische toepassingen te vinden bij het detecteren
van het type neerslag. France8, Canada, de Verenigde Staten, Australië en anderen hebben sommige van hun radars getransformeerd om dit concept in pre-operationele modus te gebruiken. Sinds 2003 is er onderzoek gaande naar het gebruik van phased array-antennes die zijn geassembleerd in driedimensionale elektronische scanningradar om het mechanische geluid bij elektronische scanning te vervangen, wat daarom sneller is. |
| |
| Werking van een weerradar |
| |
| In tegenstelling tot een continue golfradar is een weerradar een monostatische pulsradar. Het zendt periodiek een puls van zeer korte duur uit. Het interval tussen twee pulsen wordt berekend voor een bepaald radarbereik. Hierdoor kunnen terugkerende echo's van neerslag worden ontvangen voordat de volgende puls wordt uitgezonden. Het is dus mogelijk om de positie, intensiteit en beweging van neerslag te identificeren. |
| |
| Elektromagnetische puls |
Een elektromagnetische puls wordt geproduceerd door een elektronische oscillator (magnetron, klystron of andere). Het wordt via een golfgeleider naar een directionele antenne gestuurd. De bundelbreedte die de azimut- en hoogteresolutie bepaalt, hangt af van de kenmerken van de antenne,
en de enkele sinusvormige pulsduur (in de orde van een microseconde) bepaalt de radiale resolutie. Het is mogelijk om gecomprimeerde pulsen te gebruiken die zorgen voor een betere radiale resolutie. |
| |
| Zo meet een puls een volume van de atmosfeer dat toeneemt met de afstand tot de radar. We zien op de afbeelding links het volume dat wordt ingenomen door twee pulsen die op verschillende tijdstippen een radar verlieten. Met de typische afmetingen van een radarbundel varieert het gepeilde volume dus van 0,001 km nabij de radar tot 1 km op 200 km van de radar. Dit is het “radarvolume”. |
 |
| Afbeelding-1 |
|
|
 |
| Afbeelding-2 |
|
| |
| 1: Een radarstraal spreidt zich uit naarmate deze zich van het radarstation verwijdert en een steeds groter volume bestrijkt. |
| 2: Het pad van de radarstraal met hoogte |
| |
| Terugverstrooiing en kalibratie |
Wanneer een puls een gebied van neerslag binnenkomt, wordt een klein deel terugverstrooid (gereflecteerd) terug naar de radar terwijl de rest doorgaat. Dit rendement is de som van het
rendement van alle druppels in het gemeten volume en de volumedoelradarvergelijking bepaalt de intensiteit. Wanneer het volume is gevuld met doelen, krijgen we een gemiddelde van hun intensiteit, maar als het slechts gedeeltelijk is gevuld,
zullen we dit onderschatten door gebieden zonder echo's op te nemen. Naarmate het volume toeneemt met de afstand, zal deze onderschatting steeds waarschijnlijker worden. Uiteindelijk, ongeacht de intensiteit van de feedback, zal deze omgekeerd afnemen tot de afstand, wat betekent
dat we de opbrengsten moeten normaliseren, dat wil zeggen, we moeten ze met deze factor vermenigvuldigen om te doen alsof ze allemaal van dezelfde plaats kwamen. |
| |
| Positie |
| Tussen elke puls luisteren de antenne en het elektronische circuit naar de retourpuls.De maximale afstand die kan worden afgetast, hangt af van de tijd tussen twee opeenvolgende pulsen.
De positie van elke terugkeer die uit een eerste impuls komt, nadat een tweede impuls is vertrokken, zal verkeerd worden geïnterpreteerd als een terugkeer van de laatste. Meestal wordt een luisterinterval van ongeveer 1 milliseconde gebruikt, of duizend keer de duur van de puls. Dit maakt een maximale bruikbare actieradius van ongeveer 250 km mogelijk. Naast de afstand kan
men de hoogte boven de grond berekenen waar de doelen zich bevinden. Dit wordt berekend door de elevatiehoek van de radar en de kromming van de aarde te kennen. Het is ook noodzakelijk
om rekening te houden met de variatie in de dichtheid van de lagen van de atmosfeer. Dit komt omdat de radarstraal zich niet in een rechte lijn voortplant zoals in een vacuüm, maar een gebogen pad volgt vanwege de verandering in de brekingsindex met de hoogte. |
| |
| Resolutie |
| Er wordt aangenomen dat twee neerslagzones alleen duidelijk kunnen worden opgelost als ze meer dan in het bereik en/of de helft van de breedte van de azimutstraal uit elkaar liggen. |
| |
| Hoogte bepaling |
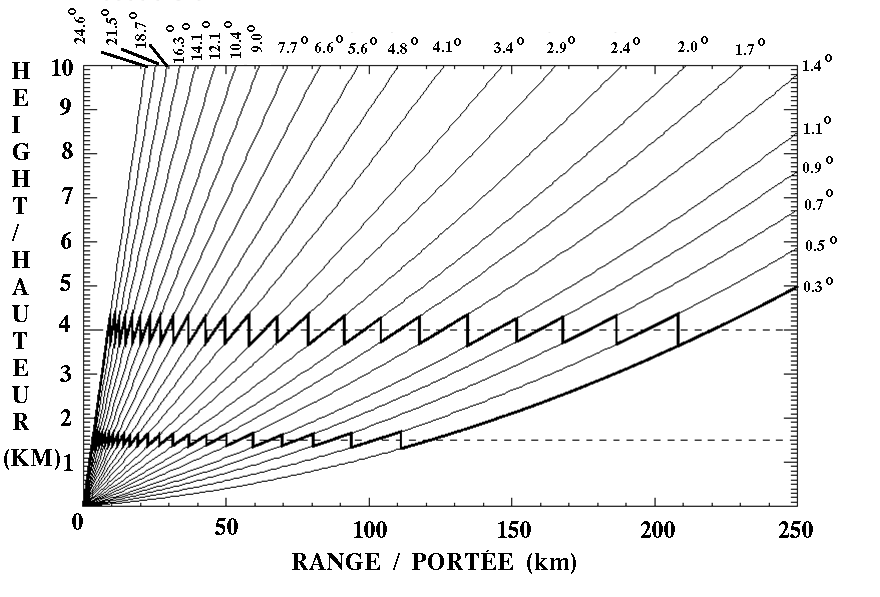
| Na het uitvoeren van één volledige rotatie bij een bepaalde elevatiehoek, zal de satellietschotel naar een hogere hoek worden geheven en nog een rotatie uitvoeren. Dit scenario herhaalt zich onder verschillende hoeken, zodat de radar in 5 of 10 minuten een driedimensionale scan van de atmosfeer maakt. Dit geeft een idee van de neerslag vanaf een niveau dicht bij de grond tot ongeveer 15 tot 20 km hoogte en meer dan 250 km afstand. |
 |
| Afbeelding-3 |
|
|
 |
| Afbeelding-4 |
|
| |
| 3: De zigzaglijnen vertegenwoordigen gegevens van twee CAPPI's op 1,5 en 4 km hoogte. |
| 4: Volume gemeten met meerdere elevatiehoeken |
| |
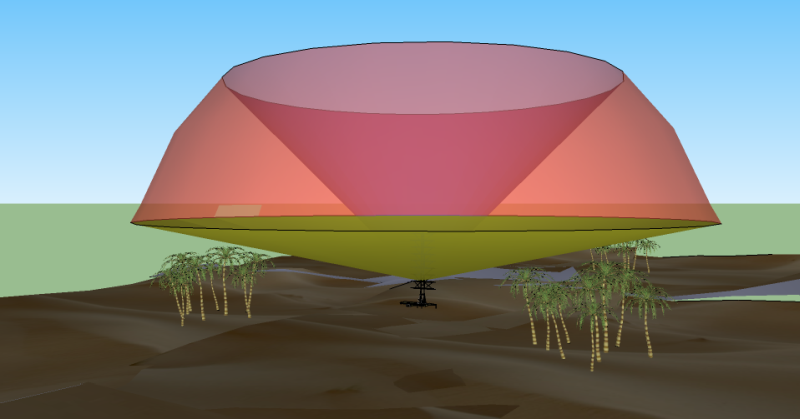
| Vanwege de kromming van de aarde en de verandering in de brekingsindex van de lucht die we zojuist hebben besproken, zal de sonde niet kunnen "zien" onder een bepaalde hoogte die afhangt van de afstand tot de radar en de gebruikte hoek. Het zal ook niet dichter bij de radar kunnen "zien" dan het pad van de maximale gebruikte hoek. De afbeelding links toont hoogte versus afstand voor een reeks hoeken die typisch worden gebruikt door Canadese weerradars, deze hoeken variëren van 0,3 tot 25 graden. De afbeelding rechts geeft een voorbeeld van een volume dat onder verschillende elevatiehoeken wordt bedekt door een peiling. De groene kegel aan de onderkant vertegenwoordigt de minimale hoek en de rode kegel in het midden de maximale hoek. |
| |
| Elk land bepaalt het aantal en de elevatiehoeken die worden gebruikt op basis van zijn specifieke behoeften. Veel landen gebruiken een beperkt aantal relatief lage hoeken om de beste schatting van de regenval te krijgen, terwijl landen waar onweer overheerst, de verticale dekking zullen vergroten. Radartype, golflengte en beeldfrequentie zijn ook factoren die het aantal onderzochte hoeken bepalen. |
| Conventionele radars |
| De meest gebruikte radars zijn die met horizontale scanning, waarvan het principe hierboven is uitgelegd. Dit zijn radars die gebruik maken van een grootformaat paraboolantenne (3 tot 10 meter in diameter) en die werken in de minst verzwakte golflengten, namelijk 5 tot 10 cm. Nationale meteorologische diensten exploiteren meerdere van dit type radars waarvan de gegevens afzonderlijk of in een netwerk worden verwerkt. |
| |
Omdat het weer zo'n belangrijk onderwerp is, hebben sommige televisiestations in de Verenigde Staten kleinere weerradars met een golflengte
van 3 cm. Meteorologen die door deze stations zijn ingehuurd, gebruiken deze gegevens om het kleinere gebied dat door hun publiek wordt bestreken, in detail te beschrijven. |
| |
| Luchthavenradar |
Luchthavens hebben naast neerslagdetectie ook zeer specifieke behoeften. Onder andere de windschering nabij de start- en landingsbanen is een belangrijk element om op te letten voor de vliegveiligheid. Hiervoor worden enkele gespecialiseerde radars gebruikt. Ze tasten ook horizontaal,
maar doen minder elevatiehoeken, met een hogere resolutie en vaker. Een goed voorbeeld zijn de Terminal Doppler Weather Radar (TDWR) luchthaven weerradars die worden ingezet op grote Amerikaanse luchthavens. |
| |
| Mobiele radars |
| Verschillende universiteiten en enkele nationale weerdiensten hebben radars ontwikkeld die van site naar site kunnen worden verplaatst voor studies van verschillende weersverschijnselen. Sommige zijn radars op ware grootte die uit elkaar kunnen worden gehaald en ergens kunnen worden geplaatst voor langetermijnstudies. Anderen hebben kleinere antennes op een vrachtwagen gemonteerd die het weer kunnen volgen waar het gebeurt. Dit is het geval met de Doppler on Wheels (of DOW), van het Centre for Severe Weather Research in Boulder (Colorado), die wordt gebruikt voor onderzoek naar de structuur van hevige stormen, orkanen en fijnmazige meteorologische verschijnselen. Deze radars gebruiken een kortere golflengte om een goede resolutie te behouden. |
 |
| Afbeelding-5 |
|
|
 |
| Afbeelding-6 |
|
|
 |
| Afbeelding-7 |
|
|
| 5: Doppler On Wheels observeert tornado nabij Attica, Kansastica |
| 6: 915 MHz windprofiler in de Verenigde Staten van Amerika (de middelste doos), omringd door luidsprekers van een RASS |
| 7: Millimeterradar van het Atmospheric Research Program van het United States Department of Energy. |
| |
| Windprofiler |
Een windprofiler is een type verticaal gemonteerde radar die in de meteorologie wordt gebruikt om de windrichting en -snelheid te meten met behulp van het Doppler-Fizeau-effect met een zeer hoge resolutie (meestal 100 tot 200 m verticaal en minder dan 100 m verticaal). Hij merkt de variatie
in de brekingsindex van lucht op volgens de verstrooiingstheorie van Bragg (de wet van Bragg). Deze variatie is te wijten aan de turbulentie van de bewegende lucht door de variatie van de dichtheid. Wanneer de index verandert over een afstand die overeenkomt met de helft van de golflengte
van de gebruikte radar, is er constructieve feedback tussen de golven die terugkeren uit opeenvolgende variatiezones. |
| |
| Wolkenradars |
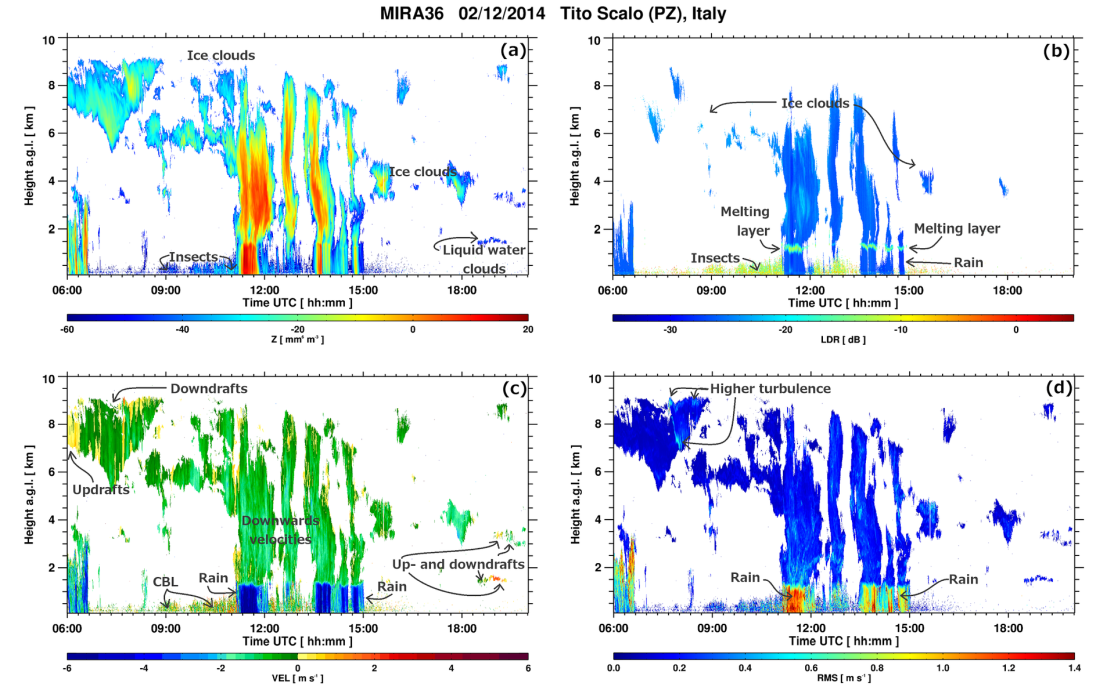
| Een millimeterwolkenradar is een verticaal gerichte radar die gebruik maakt van extreem hoge frequenties in het bereik van 30 tot 100 GHz om wolken boven het hoofd te onderzoeken. Het wordt gebruikt om de kenmerken van wolken te bepalen en hun fysica te bestuderen met een zeer hoge resolutie in de orde van enkele tientallen meters binnen bereik en 1 tot 10 seconden in de tijd. Deze radars worden niet alleen gebruikt bij onderzoek, maar dagelijks in bepaalde landen door meteorologen om het weer te volgen. |
| |
| Wolkendruppels hebben een diameter in de orde van 30 tot 100 micrometer. Om Rayleigh-verstrooiing toe te passen en om de echo's evenredig te laten zijn aan hun intensiteit, moet de gebruikte golflengte ongeveer tien keer zo groot zijn als de diameter van de doelen. Daarom is een millimeterradar geschikt voor het onderzoeken van wolken. Een conventionele meteorologische radar, die werkt op een centimetergolflengte en is aangepast aan neerslag, gebruikt een te lange golflengte. |
| |
Om de eigenschappen van wolken te meten, moet de radar verticaal worden gericht en zowel in reflectiviteit als in radiale snelheid door het
Doppler-effect tasten. Wat inderdaad interessant is om op te merken in de wolk is zijn dikte, zijn basis en zijn top, het water- en ijsgehalte evenals zijn variatie met hoogte, en tenslotte de verticale snelheid van de deeltjes. Het opstellen van cloudprofielen maakt het vervolgens mogelijk om het begrip van clouds te verbeteren. |
| |
| Deze radars kunnen op een satelliet zoals CloudSat worden gemonteerd en naar het dieptepunt wijzen, of op de grond en naar het zenit wijzen. Omdat het signaal sterk wordt verzwakt door water in vloeibare vorm, kan het geluid niet meer dan 30 kilometer dik zijn |
 |
| Afbeelding-8 |
|
|
 |
| Afbeelding-9 |
|
|
| 8: Voorbeeld van een grafiek die de kenmerken van wolken laat zien. |
| 9: Weerradar in de neus van een NASA-onderzoeksvliegtuig |
|
|
| Radar in de luchtvaart |
| Een van de belangrijke toepassingen voor de veiligheid van vliegtuigpassagiers is weerradar in de lucht. Hiermee kan de piloot neerslag en windschering volgen. Over het algemeen bevindt de radar zich in de neus van het vliegtuig, maar hij is ook te vinden onder het vliegtuig, onder een van de vleugels of aan de staart, afhankelijk van de configuratie of de behoeften. |
| |
| In tegenstelling tot grondradars, moet de antenne van een radar in de lucht worden gebruikt onder verschillende hoeken die rekening houden met de houding van het apparaat. Dat laatste kan namelijk klimmen, dalen of draaien zijn en er moet een compenserend gyroscopisch mechanisme worden ingebouwd om een constant beeld van de omgeving te geven. |
| |
De grote uitdaging van weerradars in de lucht is om de echo voldoende te filteren vanwege de nabijheid van de grond (vooral tijdens het opstijgen
en landen). Deze laatste wordt teruggebracht door de hoofdlob wanneer de radar naar de grond wijst, maar ook door de secundaire lobben, ongeacht de positie van de radar. Om het belang van de grondecho te verminderen, moet de hoofdlob boven de horizon wijzen. Om de werklast van de piloten te verminderen, passen de nieuwe generatie radars dus automatisch de verticale helling van de radar aan de houding van het vliegtuig aan. Het is ook mogelijk om de helling handmatig aan te passen door de piloten. |
| |
| De eenvoudigste techniek om grondruis te verminderen, is door het Doppler-effect te gebruiken, ervan uitgaande dat de grond niet beweegt ten opzichte van de wolken. Het gedeelte van het ontvangen signaalspectrum dat overeenkomt met Doppler-snelheden dichtbij de nulsnelheid wordt gefilterd. Deze techniek heeft verschillende nadelen: een deel van de regen met een lage radiale snelheid wordt ook gefilterd en de echo van bewegende objecten op de grond (zoals auto's of windturbinebladen) wordt door deze methode niet correct gefilterd. Moderne radars in de lucht gebruiken meer uitgebreide filteralgoritmen (permanente echofiltering, enz.), en hebben over het algemeen een terreindatabase met hoge resolutie, die een betere filtering van grondecho's mogelijk maakt. |
| |
| In tegenstelling tot grondradars, scannen luchtradars niet 360 graden rond het vliegtuig, maar alleen 180 graden heen en weer in een enkele elevatiehoek of langs een kegel waarvan de as de horizon is. Ze verkrijgen dus gegevens van het PPI-type die gedeeltelijk kunnen zijn en de piloten zullen vaak de elevatiehoek aanpassen om de significante echo's te lokaliseren. |
| |
| Bij commerciële radars liggen de gebruikte golflengten over het algemeen in de X-band (rond de 3 cm, dus frequenties van 8.000 tot 12.500 MHz), wat het mogelijk maakt om kleine antennes te gebruiken die toch een goede resolutie hebben. Het maximale bruikbare bereik is gewoonlijk 180 nautische mijl (333 km), maar meestal stelt de piloot het in op 30 tot 80 nautische mijlen vanwege de demping op deze golflengte en de noodzaak om zich te concentreren, vooral in de directe omgeving. |
| Berekening in decibel (dBZ) |
Retourecho's ("reflectiviteit") worden geanalyseerd op hun intensiteit om de neerslagsnelheid in het gescande volume vast te stellen.
De gebruikte golflengten (1-10 cm) zorgen ervoor dat deze terugkeer evenredig is met de snelheid omdat ze binnen de geldigheid van Rayleigh-verstrooiing vallen, die stelt dat de doelen veel kleiner moeten zijn dan de golflengte van de scangolf (met een factor 10) . |
| |
| Reflectiviteit waargenomen door de radar varieert met de zesde macht van de diameter van de regendruppels, het kwadraat van de diëlektrische constante van de doelen en de druppelgrootteverdeling van de druppels. Neerslagsnelheid is daarentegen gelijk aan het aantal deeltjes, hun volume en hun valsnelheid.We beschouwen de Marshall-Palmer-verdeling waarbij de verdeling van regendruppels voldoet aan de relatie: |
| |
- De variatie in diameter en de diëlektrische constante tussen de verschillende soorten neerslag (regen, sneeuw, motregen, hagel, enz.) is
erg groot en de equivalente reflectiviteit wordt daarom uitgedrukt in dBZ (10 keer de logaritme van de verhouding of decibel Z). |
- De antenne die onder een bepaalde elevatiehoek om zijn as draait, zendt in elke kijkhoek een groot aantal pulsen uit. De equivalente
reflectiviteit die terugkeert van elke puls voor elk van de doelvolumes wordt daarom genoteerd om een gemiddelde geluidsintensiteit voor
dat volume te berekenen. |
|
|
 |
| |
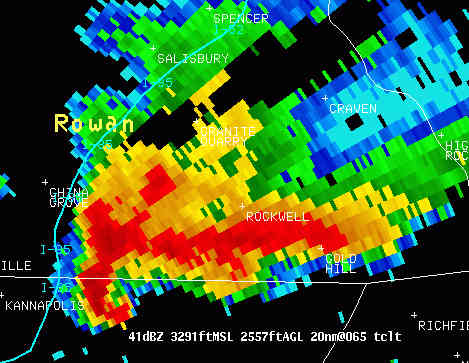
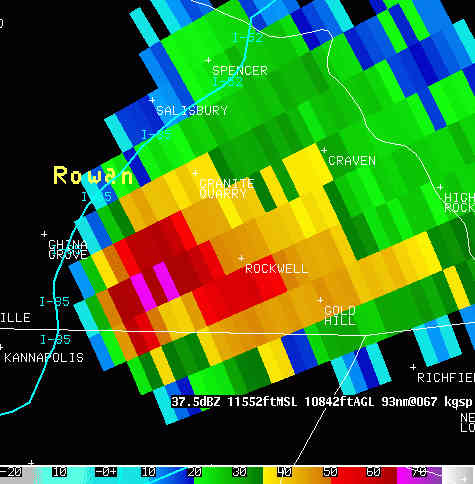
| Hoe de reflectiviteit op een radarscherm af te lezen? |
| Radarretouren worden meestal beschreven op kleur of niveau. De kleuren in een radarbeeld variëren normaal gesproken van blauw of groen voor zwakke rendementen, tot rood of magenta voor zeer sterke rendementen. De aantallen in een mondelinge melding nemen toe met de ernst van de aangiften. De Amerikaanse National NEXRAD-radarsites gebruiken bijvoorbeeld de volgende schaal voor verschillende niveaus van reflectiviteit: |
| |
| - Magenta: 65 dBZ (extreem zware neerslag,> 410 mm per uur, maar waarschijnlijk hagel) |
| - Rood: 50 dBZ (zware neerslag van 2 in (51 mm) per uur) |
| - Geel: 35 dBZ (matige neerslag van 0,25 in (6,4 mm) per uur) |
| - Groen: 20 dBZ (lichte neerslag) |
| |
| Sterke rendementen (rood of magenta) kunnen niet alleen duiden op zware regen, maar ook op onweer, hagel, harde wind of tornado's, maar ze moeten zorgvuldig worden geïnterpreteerd om de hieronder beschreven redenen. |
| |
| Luchtvaartconventies |
| Bij het beschrijven van weerradarretouren, zullen piloten, dispatchers en luchtverkeersleiders doorgaans verwijzen naar drie retourniveaus: |
| |
- Niveau 1 komt overeen met een groene radarretour, wat wijst op meestal lichte neerslag en weinig tot geen turbulentie, wat leidt tot een
mogelijkheid van verminderd zicht. |
- Niveau 2 komt overeen met een gele radarretour, wat wijst op matige neerslag, wat leidt tot de mogelijkheid van zeer slecht zicht,
matige turbulentie en een ongemakkelijke vlucht voor vliegtuigpassagiers. |
- niveau 3 komt overeen met een rode radarretour, wat duidt op zware neerslag, wat leidt tot de mogelijkheid van onweer en ernstige turbulentie
en structurele schade aan het vliegtuig. |
| |
| Vliegtuigen proberen waar mogelijk terugkeer van niveau 2 te vermijden, en zullen altijd niveau 3 vermijden, tenzij het speciaal ontworpen onderzoeksvliegtuigen zijn. |
| |
| Neerslagtypes |
| Sommige displays van commerciële televisiezenders (zowel lokaal als nationaal) en weerwebsites, zoals The Weather Channel en AccuWeather, tonen neerslagtypes tijdens de wintermaanden: regen, sneeuw, gemengde neerslag (ijzel en ijzel). Dit is geen analyse van de radargegevens zelf, maar een nabehandeling met andere gegevensbronnen, waarvan de primaire oppervlakterapporten (METAR) zijn. |
| |
Boven het gebied dat wordt bestreken door radarecho's, heeft een programma een neerslagtype toegewezen op basis van de oppervlakte-temperatuur en het dauwpunt die door de onderliggende weerstations worden gerapporteerd. Neerslagtypes gerapporteerd door door mensen bediende stations en bepaalde automatische stations (AWOS) zullen een hoger gewicht hebben.
Vervolgens voert het programma interpolaties uit
om een afbeelding met gedefinieerde zones te produceren. Deze omvatten interpolatiefouten als gevolg van de berekening.
Mesoschaalvariaties van de neerslagzones zullen ook verloren gaan. Meer geavanceerde programma's gebruiken de numerieke weersvoorspellingsuitvoer van modellen,
zoals NAM en WRF,
voor de neerslagtypen en passen deze toe als een eerste schatting op de radarecho's, en gebruiken vervolgens de oppervlaktegegevens voor de uiteindelijke uitvoer. |
| |
| Totdat gegevens over dubbele polarisatie (sectie Polarisatie hieronder) algemeen beschikbaar zijn, zijn alle soorten neerslag op radarbeelden slechts indirecte informatie en moeten ze met zorg worden behandeld |
| Neerslag wordt gevonden in en onder wolken. Lichte neerslag zoals druppels en vlokken is onderhevig aan de luchtstromingen en scanning radar kan de horizontale component van deze beweging oppikken, waardoor het mogelijk wordt om de windsnelheid en -richting waar neerslag aanwezig is in te schatten. |
| |
| De beweging van een doel ten opzichte van het radarstation veroorzaakt een verandering in de gereflecteerde frequentie van de radarpuls, vanwege het Doppler-effect. Bij snelheden van minder dan 70 meter/seconde voor weerecho's en radargolflengte van 10 cm komt dit neer op een verandering van slechts 0,1 ppm. Dit verschil is te klein om door elektronische instrumenten te worden opgemerkt. Omdat de doelen echter iets tussen elke puls bewegen, heeft de geretourneerde golf een merkbaar faseverschil of faseverschuiving van puls tot puls. |
| |
| Puls paren |
| Doppler-weerradars gebruiken dit faseverschil (pulspaarverschil) om de beweging van de neerslag te berekenen. De intensiteit van de achtereen volgens terugkerende puls van hetzelfde gescande volume waar doelen iets zijn verplaatst.Deze snelheid wordt de radiale Doppler-snelheid genoemd omdat het alleen de radiale variatie van afstand versus tijd tussen de radar en het doel geeft.
De werkelijke snelheid en bewegingsrichting moet worden verkregen door het hieronder beschreven proces. |
| |
 |
| Afbeelding-10 |
|
|
 |
| Afbeelding-11 |
|
| |
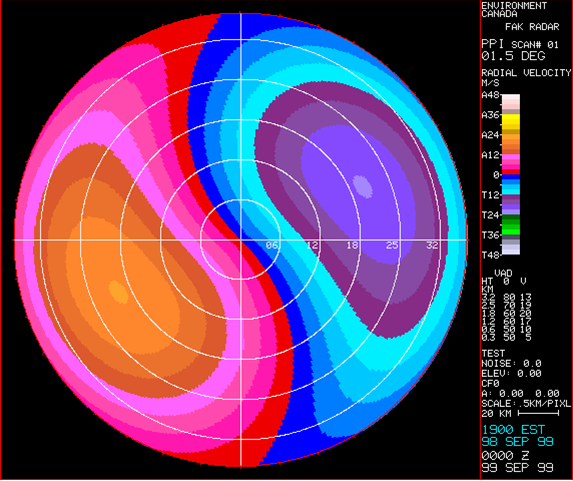
10: Geïdealiseerd voorbeeld van Doppler-uitvoer. Naderende snelheden zijn in blauw en terugtrekkende snelheden zijn in rood.
Let op de sinusvormige snelheidsvariatie wanneer u met een bepaald bereik over het scherm gaat. |
| 11: Maximaal bereik van reflectiviteit (rood) en ondubbelzinnig Doppler-snelheidsbereik (blauw) met pulsherhalingsfrequentie |
| |
| Doppler-dilemma |
| De fase tussen pulsparen kan variëren. Dit wordt de Nyquist-snelheid genoemd. Dit is omgekeerd afhankelijk van de tijd tussen opeenvolgende pulsen: hoe kleiner het interval, hoe groter het snelheidsbereik. |
| |
| De keuze wordt om het bereik van reflectiviteit te vergroten ten koste van het snelheidsbereik, of het laatste te vergroten ten koste van het bereik van reflectiviteit. Over het algemeen is het bruikbare bereikcompromis 100-150 km voor reflectiviteit. Dit betekent dat voor een golflengte van 5 cm (zoals weergegeven in het diagram) een eenduidig snelheidsbereik van 12,5 tot 18,75 meter/seconde ontstaat (voor respectievelijk 150 km en 100 km). Voor een 10 cm-radar zoals de NEXRAD zou het ondubbelzinnige snelheidsbereik verdubbeld zijn. |
| |
Sommige technieken die gebruik maken van twee alternerende pulsherhalingsfrequenties maken een groter Doppler-bereik mogelijk. De snelheden
die met de eerste pulsfrequentie worden genoteerd, kunnen gelijk of verschillend zijn met de tweede. Bijvoorbeeld als de maximale snelheid met een bepaalde snelheid 10 meter/seconde is en die met de andere snelheid 15 m/s.
De gegevens die van beide komen, zullen tot 10 m/s hetzelfde zijn en daarna verschillen. Het is dan mogelijk om een wiskundige relatie tussen de twee rendementen te vinden en de
werkelijke snelheid te berekenen buiten de limiet van de twee pulsherhalingsfrequenties |
| |
| Doppler-interpretatie |
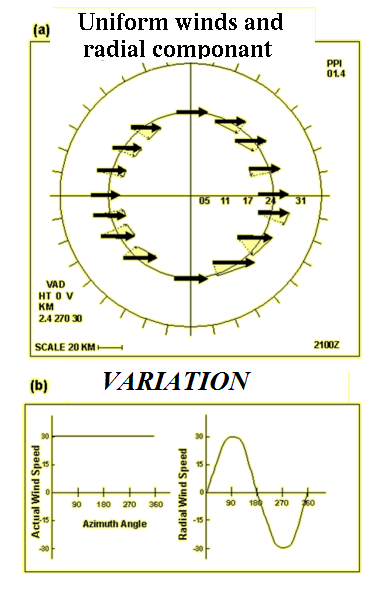
| In een uniforme regenbui die naar het oosten beweegt, zal een naar het westen gerichte radarstraal de regendruppels naar zichzelf "zien", terwijl een naar het oosten gerichte straal de druppels zal "zien". Wanneer de bundel naar het noorden of naar het zuiden scant, wordt er geen relatieve beweging waargenomen. |
| |
| Synoptisch |
| In de synoptische schaalinterpretatie kan de gebruiker de wind op verschillende niveaus boven het radardekkingsgebied extraheren. Omdat de straal 360 graden rond de radar scant,
zullen gegevens uit al die hoeken komen en de radiale projectie zijn van de werkelijke wind op de individuele hoek. Het door deze scan gevormde intensiteitspatroon kan worden weergegeven door een cosinuscurve (maximaal in de neerslagbeweging en nul in de loodrechte richting). Men kan dan de richting en de sterkte van de beweging van deeltjes berekenen, zolang er maar voldoende dekking op het radarscherm is. |
| |
| De regendruppels vallen echter. Omdat de radar alleen de radiale component ziet en een bepaalde hoogte vanaf de grond heeft, worden de radiale snelheden verontreinigd door een fractie van
de valsnelheid. Deze component is verwaarloosbaar in kleine elevatiehoeken, maar moet in aanmerking worden genomen voor grotere scanhoeken. |
| |
| Meso schaal |
In de snelheidsgegevens kunnen er kleinere zones in de radardekking zijn waar de wind verschilt van de hierboven genoemde. Een onweersbui is bijvoorbeeld een fenomeen op mesoschaal
dat vaak rotaties en turbulentie omvat. Deze kunnen slechts enkele vierkante kilometers beslaan,
maar zijn zichtbaar door variaties in de radiale snelheid. Gebruikers kunnen snelheidspatronen in de wind herkennen die verband houden met rotaties, zoals mesocycloon, convergentie (uitstroomgrens) en divergentie (downburst). |
| |
 |
| Afbeelding-12 |
|
|
 |
| Afbeelding-13 |
|
| |
| 12: Radiale component van echte wind
bij het scannen door 360 graden |
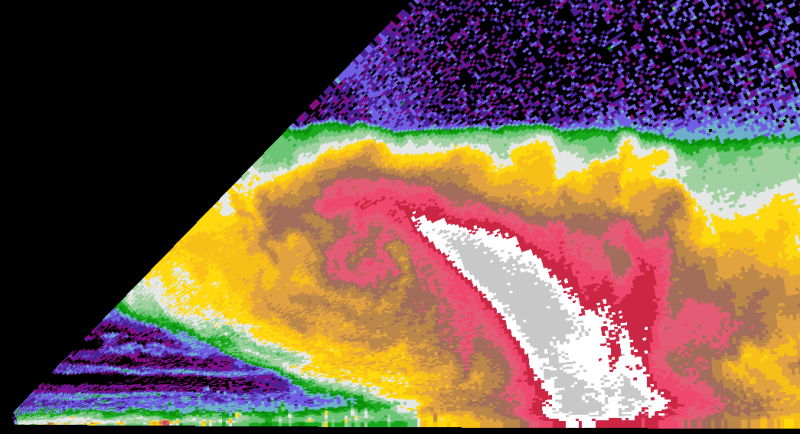
| 13: Targeting met dubbele polarisatie onthult de vorm van de druppel reveal |
| |
| Polarisatie |
| Druppels vallend vloeibaar water hebben de neiging om een grotere horizontale as te hebben vanwege de luchtweerstandscoëfficiënt van lucht tijdens het vallen (waterdruppels). Hierdoor wordt
de dipool van het watermolecuul in die richting georiënteerd; dus radarbundels zijn over het algemeen horizontaal gepolariseerd om de maximale signaalreflectie te ontvangen. |
| |
| Als twee pulsen gelijktijdig worden verzonden met orthogonale polarisatie (verticaal en horizontaal, respectievelijk ZV en ZH), worden twee onafhankelijke sets gegevens ontvangen.
Deze signalen kunnen op verschillende handige manieren worden vergeleken: |
| |
- Differentiële reflectiviteit is evenredig met de verhouding van de gereflecteerde horizontale en verticale vermogensretouren. Het is onder andere
een goede indicator voor de druppelvorm. Differentiële reflectiviteit kan ook een schatting geven van de gemiddelde druppelgrootte, aangezien
grotere druppels meer onderhevig zijn aan vervorming door aerodynamische krachten dan kleinere (dat wil zeggen, grotere druppels hebben meer
kans om "hamburgerbroodje-vormig" te worden) als ze door de lucht. |
- Correlatiecoëfficiënt - Een statistische correlatie tussen de gereflecteerde horizontale en verticale vermogensrendementen. Hoge waarden,
bijna één, duiden op homogene neerslagtypen, terwijl lagere waarden wijzen op regio's met gemengde neerslagtypen, zoals regen en sneeuw,
of hagel, of in extreme gevallen puin in de lucht, meestal samenvallend met een tornado-vortexsignatuur. |
- Lineaire depolarisatieverhouding - Dit is een verhouding van een verticale vermogensretour van een horizontale puls of een horizontale
vermogensretour van een verticale puls. Het kan ook regio's aangeven waar sprake is van een mengsel van neerslagtypen |
|
- De differentiële fase is een vergelijking van het geretourneerde faseverschil tussen de horizontale en verticale pulsen. Deze faseverandering
wordt veroorzaakt door het verschil in het aantal golfcycli (of golflengten) langs het voortplantingspad voor horizontaal en verticaal gepolariseerde
golven. Het moet niet worden verward met de Doppler-frequentieverschuiving, die wordt veroorzaakt door de beweging van de wolk en
neerslagdeeltjes. In tegenstelling tot de differentiële reflectiviteit, correlatiecoëfficiënt en lineaire depolarisatieverhouding, die allemaal afhankelijk
zijn van gereflecteerd vermogen, is de differentiële fase een "propagatie-effect". Het is een zeer goede schatting van de regensnelheid en wordt
niet beïnvloed door demping. De bereikafgeleide van differentiële fase (specifieke differentiële fase, Kdp) kan worden gebruikt om gebieden met
sterke neerslag / demping te lokaliseren.
|
| |
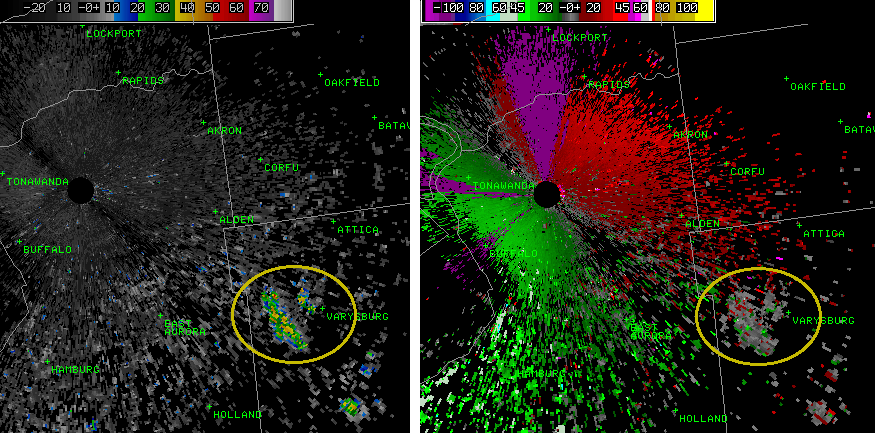
| Met meer informatie over de vorm van deeltjes kunnen dual-polarisatieradars gemakkelijker puin in de lucht onderscheiden van neerslag, waardoor het gemakkelijker wordt om tornado's te lokaliseren. |
| |
Met deze nieuwe kennis toegevoegd aan de reflectiviteit, snelheid en spectrumbreedte geproduceerd door Doppler-weerradars,
hebben onderzoekers gewerkt aan de ontwikkeling van algoritmen om neerslagtypen en niet-meteorologische doelen te onderscheiden en om
betere schattingen van de neerslagaccumulatie te produceren. In de VS zijn NCAR en NSSL wereldleiders op dit gebied geweest. |
| |
NOAA zette een testimplementatie voor dual-polarometrische radar op NSSL en rustte al zijn 10 cm NEXRAD-radars met dual-polarisatie,
die in april 2013 werd voltooid. In 2004 werd ARMOR Doppler Weather Radar in Huntsville, Alabama uitgerust met een SIGMET-antenne
gemonteerde ontvanger, waardoor de operator dual-polarmetrische mogelijkheden kreeg. McGill University JS Marshall Radar Observatory in Montreal, Canada heeft zijn instrument (1999) omgezet en de gegevens werden operationeel gebruikt door Environment Canada in Montreal tot de sluiting in 2018. Een andere radar van Environment Canada, in King City (ten noorden van Toronto), was in 2005 dubbel gepolariseerd en gebruikt een golflengte van 5 cm, die een grotere demping ervaart. Milieu Canada zet geleidelijk al zijn radars om in dual-polarisatie. Météo-France is van plan om dual-polariserende Doppler-radar op te nemen in zijn netwerkdekking. |
| |
| Belangrijkste soorten geproduceerde afbeeldingen |
| |
| Alle gegevens die door de radarmeting worden verkregen, worden weergegeven volgens het formaat. Sommige producten worden gebruikt om verschillende soorten gegevens weer te geven, terwijl andere specifieker zijn. Ten slotte zal het scherm, afhankelijk van het type gegevens, een kleurconventie gebruiken die zal variëren. |
| |
| Weergave schermen |
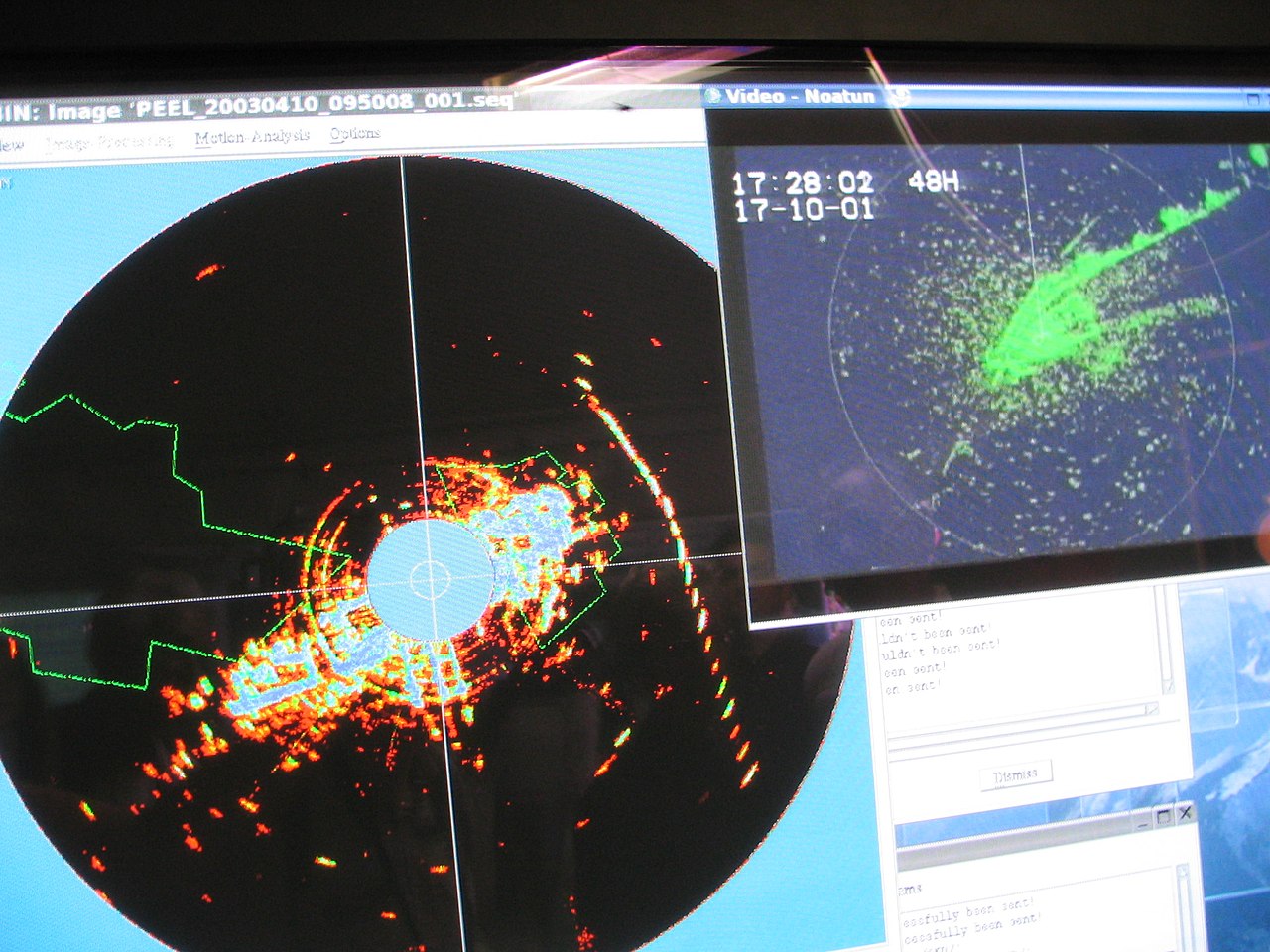
Oorspronkelijk werden reflectiviteitsgegevens alleen door de radaroperator gezien op een CRT-scherm, dus de intensiteit werd aangegeven door de variatie in helderheid. Van deze beelden of analoge beelden op papier zijn vervolgens foto's gemaakt in wit- en grijstinten. Toen computers het mogelijk maakten om gegevens van weerradars digitaal te verwerken, werd het mogelijk om een kleur te relateren aan een neerslagsnelheid.
Deze praktijk verspreidde zich naar andere soorten gegevens toen ze beschikbaar kwamen. Reflectiviteit, radiale snelheidsgegevens en dual-polarimetriegegevens gebruiken over het algemeen een andere kleurcode. Er is geen internationale conventie over de te gebruiken kleuren,
maar eerder een praktijk die zich heeft verspreid met uitwisselingen in het veld. |
| |
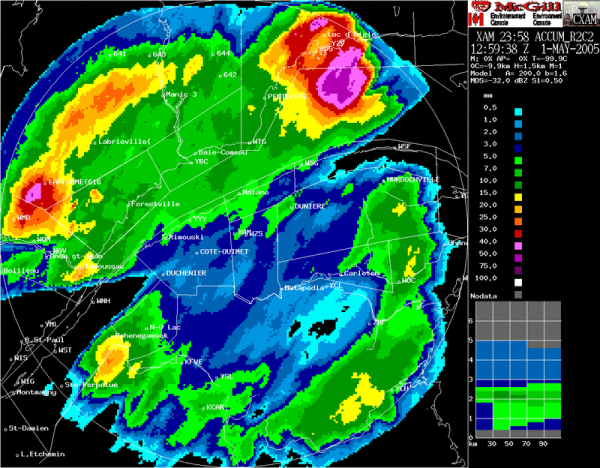
| Over het algemeen gebruiken reflectiviteitsafbeeldingen een kleurvariatie die lijkt op de regenboog. De zwakste intensiteiten worden aangegeven door lichtblauw (cyaan), de matige intensiteiten door geel en de sterke door rood en vervolgens magenta. Intensiteiten kunnen worden gerelateerd aan reflectiviteit in dBZ of het equivalent daarvan in millimeters/centimeters per uur. De afbeeldingen die beschikbaar zijn op de website van de Meteorological Service of Canada gebruiken bijvoorbeeld deze schaal: in de winter staat paars voor de hoogste neerslagsnelheid (20 cm/u), terwijl het blauwgroen onderaan de schaal voor de laagste snelheid (0,1 cm) /H). Tijdens de zomermaanden wordt de reflectiviteitsschaal vervangen door die van regenval, in mm/u, die varieert van een spoor tot meer dan 100 mm/u. |
| |
| Sommige gebruikers geven echter de voorkeur aan gemakkelijker te interpreteren numerieke codes. Dus wanneer een vliegtuigpiloot of luchtverkeersleider de intensiteit van neerslagecho's op hun radarscherm beschrijft, gebruiken ze niveaus: |
| |
| Niveau-1: voor lichte neerslag. |
| Niveau-2: voor matige neerslag mogelijk gerelateerd aan slecht zicht en turbulentie. |
| Niveau-3: voor zware regen/ sneeuw geassocieerd met gevaarlijke vliegomstandigheden. |
|
|
 |
| |
| Sommige commerciële displays geven het type neerslag aan. Zo kunnen de beelden die in de winter op televisiejournaals te zien zijn, de gebieden regen, ijzel en sneeuw scheiden. Dit is geen radarinformatie maar een associatie met informatie van oppervlakteweerstations. Een programma analyseert de temperatuur, het dauwpunt en het type neerslag dat door METAR's wordt gerapporteerd onder een radar-clutterzone en verdeelt de zones. Deze analyse kan worden verbeterd door gegevens van numerieke weersvoorspellingsmodellen als testveld te gebruiken, maar het is nog steeds onderhevig aan afvlakkingsfouten en houdt geen rekening met kleinschalige effecten in de verdeling van neerslagtypes (luchtkoude gevangen in een vallei die geeft bijvoorbeeld ijskoude regen in plaats van regen). Wanneer dual-polarisatiegegevens algemeen beschikbaar komen, zal een dergelijke analyse betrouwbaarder zijn. |
| |
| Doppler-snelheid |
In het geval van de radiale snelheid verkregen door Doppler-gegevens, wordt het principe van roodverschuiving of blauwverschuiving gebruikt zoals
in de astronomie. Dus het gebied met neerslag dat de radar nadert, wordt aangegeven met koude kleuren blauw/groen/paars, afhankelijk van hun radiale snelheid, terwijl neerslag die weggaat wordt weergegeven door warme kleuren rood/geel. Naderende snelheden kunnen ook worden aangegeven met een positief getal en die terugwijken met een negatief getal, waarbij de waarde de grootte van de radiale snelheid weergeeft |
| |
| PPI (panoramisch zicht met constante elevatiehoek) |
Omdat de gegevens die door de radar worden onderzocht, met één elevatiehoek tegelijk worden gedaan, waren de eerste afbeeldingen van een panoramische weergave van de gegevens vanuit elke hoek afzonderlijk (PPI). Dit type gegevens moet worden geïnterpreteerd door te onthouden dat de radarstraal boven de grond uitstijgt als men zich van de radar verwijdert.
Dus wat we in de buurt van de radar zien, is op een veel lager niveau dan
wat we zien op 200 km. |
| |
Als gevolg hiervan kan het lijken alsof een wolk met hoge regensnelheden op
30 km van de radar in intensiteit afneemt of toeneemt naarmate deze zich van de radar verwijdert. In feite, aangezien onze straal bij de tweede keer hoger in de wolk is, kijkt hij naar een ander deel van de laatste. |
| |
| Een PPI heeft ook last van retouren vanaf de grond in de buurt van de radar, omdat een deel van de uitgezonden energie in de zijlobben van de hoofdstraalas terechtkomt. Dit geeft zeer sterke opbrengsten die verkeerd kunnen worden geïnterpreteerd als zware neerslag. |
| |
| GEBRUIK: Alle soorten gegevens: reflectiviteit, radiale snelheid en de verschillende polarimetrievelden. |
|
|
 |
| Afbeelding van een stormfront in reflectiviteit (in dBZ), gezien op PPI (NOAA). |
|
| CAPPI (panoramisch zicht op constante hoogte) |
| Om de problemen van de PPI op te lossen, is de CAPPI ontwikkeld door Canadese onderzoekers. Het is eigenlijk een horizontale doorsnede door de reeks elevatiehoeken die door de radar worden gemeten. Afhankelijk van het aantal hoeken en hun verhogingen kan een min of meer nauwkeurige snede gemaakt worden. Afhankelijk van het niveau van onze snede, komt het ook voor dat we op een bepaalde afstand geen gegevens meer hebben op de gezochte hoogte. Wat dan op de CAPPI te zien is, zijn de gegevens van de PPI die zich het dichtst bij dat niveau bevinden. |
| |
|
In de bovenstaande hoekafbeelding (sectie met sonderingsstrategie) variëren de 24 hoeken van 0,5 tot 25 graden, dus we kunnen een CAPPI doen door die gegevens. De gedurfde gekartelde lijnen vertegenwoordigen CAPPI's op 1,5
en 4 km hoogte.
Merk op dat voorbij 120 km de laagste hoek groter is dan 1,5 km en dat deze bij 200 km groter is dan 4 km. Dus het deel van de CAPPI's
dat buiten deze limieten zal zijn, zal daarom eerder een PPI van de laagste
hoek zijn. |
| |
| Gebruik |
| Om een CAPPI relatief vloeiende point-to-point-beelden te geven, heeft het gegevens nodig vanuit een groot aantal verticale hoeken om gaten in de verticale dekking te voorkomen. Daarnaast is het van belang dat het dataveld vrij is van abrupte hoogteveranderingen. Daarom zijn het vooral de reflectiviteitsgegevens die op CAPPI's worden weergegeven. |
| |
| Doppler-snelheidsgegevens zijn over het algemeen luidruchtiger omdat de windrichting binnen een paar honderd meter hoogte plotseling kan veranderen, wat gestreepte CAPPI-beelden kan veroorzaken als de snede wordt gemaakt rond de hoogte van deze verandering. Alleen McGill University (Montreal, Canada) produceert regelmatig Doppler-CAPPI's. Sommige onderzoekers gebruiken het echter onder meer voor de analyse van de circulatie rond tropische cyclonen en voor de ontwikkeling van NEXRAD49-producten. |
|
|
 |
| Cappi van reflectiviteit op 1,5 km hoogte, radar van Montreal. |
|
| |
| Ten slotte zijn dual bias-gegevens nieuw en kunnen ze ook luidruchtig zijn. Er is geen CAPPI-voorbeeld van deze gegevens bekend, maar ten minste één radarelektronicabedrijf genaamd SIGMET heeft software waarmee dit kan worden gedaan. |
| |
| Cumulatieve neerslagkaart |
| Een van de belangrijkste toepassingen van meteorologische radars is om op afstand neerslag te kunnen detecteren voor hydrometrische doeleinden. Bijvoorbeeld stroombeheersingsdiensten voor rivieren, waarschuwing tegen overstromingen, planning van damwerk, enz. ze moeten allemaal weten hoeveel regen en sneeuw er over grote gebieden valt. De radar vormt een ideale aanvulling op een netwerk van regenmeters door de gegevensverzameling uit te breiden over een groot gebied, waarbij het netwerk wordt gebruikt voor de kalibratie ervan. Dit product heeft verschillende namen: kaart of afbeelding van ophopingen (Canada), waterblad (Frankrijk of in de hydrologie), kaart van neerslagniveaus, enz. |
| |
Om een beeld te krijgen van ophopingen, is het noodzakelijk om de neerslagsnelheid die op laag niveau wordt verkregen in een radarsonde te vermenigvuldigen met de gewenste duur. Omdat de neerslag beweegt, kan de snelheid slechts op een bepaald moment worden bepaald en daarom is het noodzakelijk om met regelmatige tussenpozen verschillende peilingen te
nemen en de neerslag tussen elke tijdstap te verdelen. Als we bijvoorbeeld
elke 10 minuten een PPI of CAPPI op laag niveau genereren. Door deze beelden met de computer te vergelijken, kunnen we de snelheid en bewegingsrichting van de neerslagzone afleiden. De neerslagsnelheid X (per minuut), die zich tussen twee tijdstappen van punt A naar punt B verplaatst, zal dus 10 X millimeter regen achterlaten. Deze hoeveelheid wordt dan gelijkmatig verdeeld over het pad van A naar B. Om cumulaties over langere perioden (uren, dagen, etc.) te verkrijgen, volstaat het dus om de gegevens van meerdere klinkende tijdstappen op te tellen. |
| |
| Zoals later in het artikel zal worden besproken, kunnen sommige artefacten echter worden verward met de echte gegevens in de radarretour. Om een nauwkeurigere schatting van de accumulaties te krijgen, zal het nodig zijn deze te filteren voordat deze accumulatiekaarten worden gemaakt. |
| |
15: 24-uurs ophoping van regen volgens de Val d'Irene-radar in het oosten
van Quebec (Canada). Let op de dataloze kegels in het oosten en
zuidwesten, veroorzaakt door bergen die de straal blokkeren |
|
|
 |
| Afbeelding-15 |
|
| |
| Kaart met maximale reflectie |
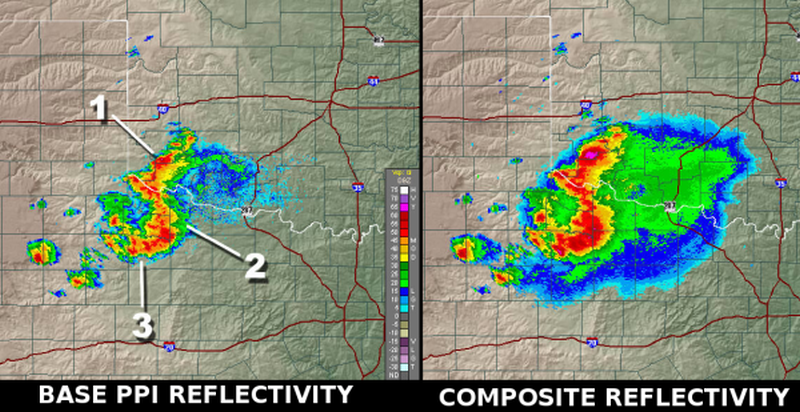
| De samengestelde reflectiviteit, of maximale reflectiviteit, is een radarbeeld waarin elk punt de maximale waarde (in DBZ) van de reflectiviteit in de kolom met gesonde lucht weergeeft52. Dit product wordt Composietreflectiviteit genoemd door de National Weather Service in de Verenigde Staten en MAXR in Canada. |
Een weerradar tast achtereenvolgens over 360 graden een reeks hoeken in
de verticaal af. De reflectiviteit bij elk van deze hoeken vertegenwoordigt de neerslagsnelheid langs een kegel die van de radar oprijst.
Elke hoek is te zien op een PPI-afbeelding. Deze snelheid varieert echter met
de hoogte en een individuele PPI geeft geen volledig beeld van de verticale structuur van neerslag. |
| |
| In de composiet worden de hoogste intensiteiten weergegeven die beschikbaar zijn op de verschillende hoeken boven elk punt van het beeld. Het is een radarproduct dat is gemaakt om reflectie op laag niveau te vergelijken met reflectie van volledige luchtkolom om bepaalde wolkenkenmerken of artefacten in radargegevens te identificeren. |
| |
16: Zones 1, 2 en 3 zijn uitgebreider op de composiet dan op de low-level
PPI, wat aantoont dat de reflectiviteit sterker is op hoogte. |
|
|
 |
| Afbeelding-16 |
|
| |
| Echo Peaks-kaart |
Een ander toepassingsgebied van radars is dat van de luchtvaart. Een zeer bruikbare kaart voor dit gebied is die van neerslagpieken. Vliegtuigen willen namelijk de hoogte van wolkentoppen weten, ook die van onweersbuien, om te weten op welke hoogte ze moeten vliegen om gevaarlijke wolken
te vermijden54. Omdat de weerradar een volume in drie dimensies aftast, kunnen we dus de hoogte vinden waarop de neerslag eindigt. Dit is niet de werkelijke hoogte van de wolken, aangezien de toppen hiervan alleen druppeltjes bevatten die niet groot genoeg zijn om op radar zichtbaar te zijn, maar het komt in de buurt. |
| |
| De manier om dit te doen is door simpelweg de gegevens van de hoogste hoek naar beneden te nemen en de hoogte en locaties bij elke kijkhoek te noteren waar een drempelwaarde voor regenval zal worden overschreden. Hoe lager deze snelheid, hoe dichter we bij de echte top van de cloud komen |
| |
| Verticale doorsnede |
| Om de verticale structuur van neerslag in wolken te kennen, wat belangrijk is voor het herkennen van het type, is een verticaal dwarsdoorsnedeproduct van radargegevens ontwikkeld. Deze worden genomen over vele elevatiehoeken en over 360 graden azimuth, ze vormen voor elk volledig klinkend een matrix van waarden in 3 dimensies. Door een doorsnedelijn te bepalen is het dus mogelijk om de reflectiviteiten, snelheden en polarimetrische waarden langs de verticaal van punt A naar punt B te tonen zoals in de afbeelding hiernaast. De resolutie van het beeld hangt af van het aantal hoeken dat in de verticaal wordt gesondeerd, de afstand tot de radar en de azimutale resolutie: hoe lager het aantal hoeken of de snede ver van de radar, hoe grover de gegevens. |
_(2563231232).png) |
| Verticale sectie van volumegegevens door een onweersbui. |
|
|
 |
| Weergave van RHI-gegevens. |
|
| |
| Dit soort doorsnede wordt soms doorsnede genoemd, maar deze term is vaag omdat het van toepassing is op elke doorsnede langs elke as in een gegevensvolume. Het kan dus ook worden toegepast op de horizontale sneden die de CAPPI geven. |
| |
Een soortgelijk product, maar op een heel andere manier gegenereerd, is de "vertical sweep". In dit geval scant de weerradar niet 360 graden rond
de site, maar scant hij eerder verticaal langs een enkele azimut zoals een siteradar. De gegevens vertegenwoordigen daarom een geluid met een zeer hoge resolutie in de verticale richting in een enkele richting. Dit type peiling wordt alleen gebruikt in onderzoek om een fenomeen zoals een cumulonimbus relatief dicht bij de radar te bestuderen en vereist een hoogte/afstandsweergave (RHI). |
| |
| Animaties en extrapolatie |
| Alle producten die zijn afgeleid van radargegevens kunnen worden geanimeerd. De gebruiker kan dus de evolutie van de zone van reflectiviteiten, snelheden, enz. en informatie af te leiden over de beweging en dynamiek van het waargenomen meteorologische fenomeen. Zo is het mogelijk om de beweging van de verstoring te extrapoleren, om op korte termijn de komst van regen in een interessante stad te voorspellen. |
| |
De animatie maakt het ook mogelijk om de ontwikkeling of afname van neerslag te observeren.
Deze onmiddellijke voorspelling kan handmatig worden gedaan door de gebruiker of door een expertsysteem dat de temporele variaties van de echo's extraheert. Software kan inderdaad neerslaggebieden identificeren door criteria van horizontale en verticale continuïteit van radarecho's toe te passen en vervolgens een kruiscorrelatie te maken om hun snelheid en bewegingsrichting te vinden. Ten slotte kan een numeriek model voor het voorspellen van de neerslagontwikkeling worden gebruikt om de extrapolatie te verfijnen. |
| |
| In de volgende paragrafen zullen de verschillende soorten radarretouren die niet afkomstig zijn van hydrometeoren (en die de visuele interpretatie verstoren) worden besproken. Een animatie maakt het mogelijk om niet-meteorologische artefacten met een willekeurig gedrag (bijvoorbeeld ruis of abnormale voortplanting) te identificeren in het geval dat deze niet vooraf zijn gefilterd. Sommige andere artefacten, zoals echo's van vogels (of zelfs muggen), bewegen echter op dezelfde manier als neerslag en het gebruik van alleen animatie zal ze niet identificeren. |
|
|
 |
| Lus van reflectiviteit PPI's (in dBZ) die de evolutie van orkaan Katrina tonen. |
|
| |
| Radarmozaïeken |
Gegevens van een enkele weerradar zijn nuttig als ze alleen van dichtbij en voor een vrij korte tijd worden bekeken. Om de beweging van neerslag echter goed te kunnen zien, moeten de outputs van verschillende radars op een mozaïekkaart worden genetwerkt. Aangezien de verschillende
radars verschillende kenmerken kunnen hebben, inclusief hun kalibratie, en overlappingsgebieden hebben, moet een beslissingsboom worden
voorzien om te kiezen welke waarde op een punt moet worden gezet om een continuüm te krijgen. |
| |
Voor radars die een zekere demping kunnen hebben bij hevige neerslag, zoals die met een golflengte van 5 cm, zullen we over het algemeen de gegevens
van de radar met het sterkste rendement op een punt plaatsen waar twee radars deze plaats bestrijken. Voor radars zonder merkbare demping, zoals
die van 10 cm, wordt in plaats daarvan de waarde van de dichtstbijzijnde radar gezet. |
| |
| Dit kan ook variëren tussen winter en zomer. In het eerste geval kan er veel positieverschil zijn door transport door de wind en variaties in de neerslagsnelheid door sublimatie (virga). Hierdoor kan een groot verschil ontstaan tussen het niveau van de radargegevens en de grond. |
| |
| Hier zijn enkele sites om de gegevens in netwerken te bekijken: |
| |
| Weather Underground Radar |
|
|
 |
| Mozaïeken van alle radars die de continentale Verenigde Staten |
|
| |
| Automatische algoritmen |
Om de informatie in radargegevens beter te kunnen identificeren, zijn verschillende computeralgoritmen ontwikkeld. Inderdaad, een meteoroloog
met een scherp oog en veel ervaring zal deze uitstapjes kunnen interpreteren, maar bepaalde details vragen teveel aandacht. Dit geldt met name voor Doppler-gegevens die alleen de radiale component geven. |
| De belangrijkste reflectiviteitsalgoritmen zijn: |
| |
- Neerslagkolommassa (VIL) wordt gebruikt om het totale neerslagpotentieel op de grond van een
individuele wolk te schatten en om grotere wolken zoals onweersbuien te identificeren. |
- Die van Potential Rafale die de VIL verbindt en de hoogte van de bovenkant van de radarecho's.
Hoe meer water zich in de wolk concentreert, hoe sterker de windstoot zal zijn wanneer de kern van
de neerslag daalt. |
| - Aanwezigheid van hagel. |
- Zwakke echo's die de plaatsen markeren waar de reflectiviteit sterker is op hoogte dan op de grond,
wat wijst op de aanwezigheid van een sterke opwaartse luchtstroom61. |
| |
| De belangrijkste algoritmen voor Doppler-snelheden: |
| |
- Identificatie van rotaties in onweersbuien. Met een weerradar kunnen we geen tornado's zien, omdat
ze kleiner zijn dan de gebruikelijke resolutie, maar we kunnen wel rotaties zien ontstaan in de
stormcellen die kunnen worden geconcentreerd tot tornado's als de omstandigheden gunstig zijn. |
| - Tracking van low-level windschering die een idee geeft van waar grote windstoten optreden. |
|
|
 |
| Het vierkant wordt ingesteld door het verwerkingsprogramma wanneer het een rotatie op de Doppler-gegevens heeft opgemerkt. Dit gebied heeft een straal van minder dan 10 km |
|
| |
| Beperkingen en artefacten |
| |
| De interpretatie van radargegevens hangt af van verschillende veronderstellingen waaraan niet altijd wordt voldaan: |
| |
| - Standaard atmosfeer. |
- Voldoet aan de wet van Rayleigh en directe relatie tussen
terugkeer en neerslagsnelheid. |
- Het volume dat door de straal wordt afgetast, is gevuld met
meteorologische doelen (druppels, vlokken, enz.), allemaal van
hetzelfde type en in een uniforme concentratie. |
| - Geen demping. |
| - Geen versterkingsfenomeen. |
| - De zijlobben zijn verwaarloosbaar. |
- De vorm van de halfvermogenbundel kan worden benaderd
door een Gauss-curve. |
| - Invallende en terugverstrooide golven zijn lineair gepolariseerd. |
- Meervoudige verstrooiing is verwaarloosbaar (geen terugkeer
naar meerdere reflecties op verschillende doelen). |
|
|
 |
| |
| De radarstraal plant zich voort door de atmosfeer en komt veel andere dingen tegen dan regen of sneeuw. Het is daarom noodzakelijk om te weten hoe je de signatuur van deze artefacten kunt herkennen om de gegevens correct te kunnen interpreteren. |
| |
| Abnormale voortplanting (niet-standaard atmosfeer) |
| Aangenomen wordt dat de radarstraal door een standaardatmosfeer zal reizen waar temperatuur, vochtigheid en druk in een normale curve met de hoogte afnemen. De berekening van de positie van de echo's en hun hoogte hangt af van deze aanname. Bij afwijking ten opzichte van deze standaard is er sprake van abnormale vermeerdering. |
| |
| Superbreking |
| Temperatuurinversies ontstaan vaak dicht bij de grond, bijvoorbeeld door luchtkoeling 's nachts terwijl het boven warm blijft. Omdat de brekingsindex van lucht sneller afneemt dan normaal, buigt de radarstraal naar de grond in plaats van verder omhoog te gaan. Uiteindelijk zal het de grond raken en teruggereflecteerd worden naar de radar. Het verwerkingsprogramma zal dan de retourecho's ten onrechte op de hoogte en afstand plaatsen die het onder normale omstandigheden zou zijn geweest. |
| |
| Dit type valse terugkeer is relatief gemakkelijk te herkennen in een tijdlus als het te wijten is aan nachtelijke afkoeling of inversie van de zee, aangezien men zich zeer sterke echo's over een gebied ziet ontwikkelen, zich zijdelings in omvang verspreidend maar niet bewegend en sterk in intensiteit variëren. Er vindt echter inversie van de temperatuur plaats vóór warme fronten en de abnormale voortplantingsecho's worden vervolgens vermengd met echte regen. |
| |
| Het extreme van dit probleem is dat wanneer de inversie erg sterk en ondiep is, de radarstraal vele malen naar de grond reflecteert omdat deze een golfgeleiderpad moet volgen. Hierdoor ontstaan meerdere banden met sterke echo's op de radarbeelden. |
| |
| Deze situatie kan worden gevonden met inversies van temperatuur omhoog of snelle afname van vocht met hoogte. In het eerste geval kan het moeilijk zijn om op te merken. |
| |
| Onderbreking |
| Als de luchttemperatuur sneller daalt dan in de standaardatmosfeer, zoals in een onstabiele luchtsituatie (convectie), treedt het tegenovergestelde effect op. Deze situatie is voorspelbaar met het luchtgeluid, maar is moeilijk te herkennen op het radarscherm. De radarstraal is dan hoger dan we denken en de echo's zijn dus op een lager niveau dan aangegeven. De straal kan ook over een neerslaggebied gaan dat hij normaal gesproken zou hebben gedetecteerd en de infrabreking beperkt dus het bereik van de weerradar door detectie op laag niveau te beperken. |
| |
| Niet-Rayleigh doelen |
Als we de neerslagsnelheid betrouwbaar willen schatten, moeten de doelen 10 keer kleiner zijn dan de radargolf volgens Rayleigh-verstrooiing.
Dit komt omdat het watermolecuul moet worden geëxciteerd door de radargolf om terug te komen. Dit geldt relatief voor regen of sneeuw, aangezien er gewoonlijk radars met een golflengte van 5 of 10 cm worden gebruikt. |
| |
Voor zeer grote hydrometeoren, aangezien de golflengte in de orde van steen is, keren de niveaus echter terug volgens de Mie-theorie.
Een rendement van meer dan 55 dBZ zal waarschijnlijk afkomstig zijn van hagel, maar zal niet evenredig variëren met de grootte. Aan de andere kant zijn zeer kleine doelen, zoals wolkendruppels, te klein om opgewonden te raken en geven ze geen meetbaar rendement op gewone weerradars. |
| |
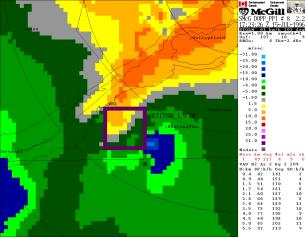
| Resolutie van een gedeeltelijke scanvolume |
De radarstraal heeft een bepaalde breedte en gegevens worden opgenomen met een bepaald aantal pulsen op elke vizierhoek en bij afzonderlijke elevatiehoeken. Als gevolg hiervan hebben we gegevens die reflectiviteits-, snelheids- en polarisatiewaarden gemiddeld over volumes van doelen.
Hoe verder we zijn, zoals we hierboven zagen, hoe groter dit volume. |
| |
| In de afbeelding links zien we bovenaan een verticale doorsnede genomen toen een onweersbui over een windprofiler ging. Die laatste heeft een resolutie van 150 m verticaal en 30 m horizontaal, waardoor je veel detail ziet. We zien onder andere dat de reflectiviteit op bepaalde plaatsen snel verandert (gradiënt). |
| |
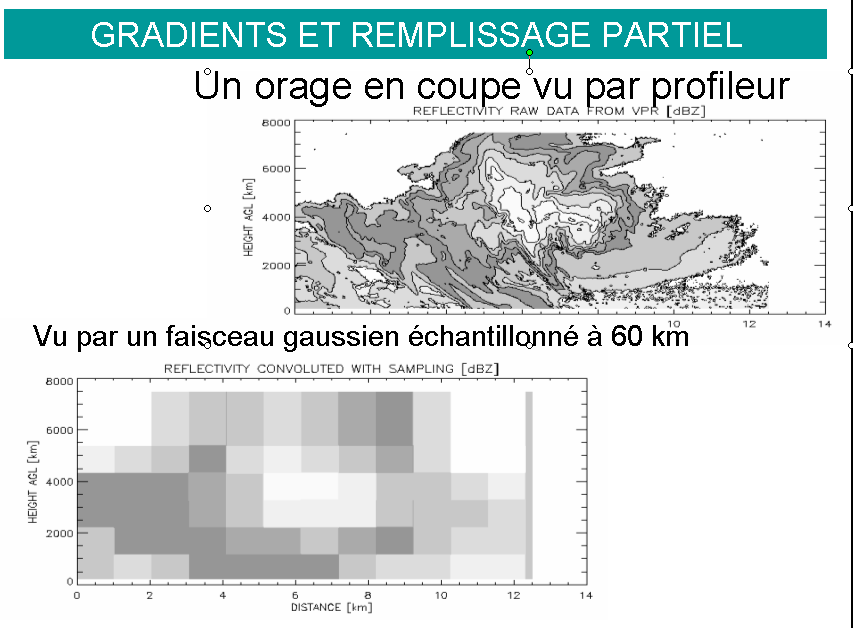 |
| Profiler hoge resolutie weergave van een onweersbui (boven) en door een weerradar (onder). |
|
|
|
|
Een supercellonweersbui gezien vanaf twee radars die bijna op dezelfde plek lagen.
De linkse afbeelding is van een TDWR en de rechtse van een NEXRAD. |
|
| |
Links: Laten we dit beeld vergelijken met het onderstaande, gesimuleerd op basis van de kenmerken van een weerradarstraal van 1 graad breed,
op een afstand van 60 km. We zien heel duidelijk de degradatie die vooral belangrijk is in de zones waar de gradiënt sterk is. Dit laat zien hoe radargegevens gemakkelijk kunnen afwijken van de veronderstelling dat het gesondeerde volume is gevuld met uniform geplaatste doelen. Bovendien, de radarstraal die een gemiddelde over een groter gebied uitstraalt, omvat het regio's die geen doelen hebben met anderen, waardoor
het beeld van neerslag groter wordt dan de realiteit. Deze afvlakkings- en zonespreidingseffecten nemen toe met de afstand, wat ertoe kan leiden
dat een gebruiker denkt dat de neerslagzones die zich van de radar af bewegen, minder intens worden. |
| |
De afbeelding rechts toont gegevens van een zware onweersbui. Het bovenste beeld, van een TDWR-radar, heeft twee keer de resolutie van NEXRAD. We kunnen veel beter de details zien die de meteoroloog zullen helpen het gevaarlijke haakechopatroon van een tornado te herkennen.
Het verkleinen van de bundelbreedte, hetzij door de antennediameter te vergroten, hetzij door de meetgolflengte te verkleinen, is daarom een belangrijke factor om beter te voldoen aan de aanname van een uniform gevuld volume, maar doet niets voor de degradatie met de afstand. |
| |
| Andere radar doelen |
Naast regen, sneeuw, ijs en andere neerslag kan de weerradar echo's van andere bronnen ontvangen.
De belangrijkste gegevensverontreinigende stoffen zijn: |
| |
| - Vogels, vooral tijdens de trek |
| - Insecten op zeer lage hoogte |
| - Elektronische lokvogels die door militaire vliegtuigen kunnen worden gedropt |
| - Stevige obstakels zoals bergen, gebouwen, vliegtuigen |
| - Reflectie van grazende hoek waterlichamen. |
| |
| Elk van deze artefacten heeft zijn eigen kenmerken waardoor ze kunnen worden herkend als echte neerslag voor een getraind oog. In de sectie Oplossingen hieronder wordt getoond dat het mogelijk is om ze te filteren door reflectiviteit, Doppler-snelheden en polarisatie te combineren. Deze gegevens kunnen voor sommige gebruikers nuttig zijn wanneer ze gescheiden zijn van neerslag. Zo hebben verschillende studies van universiteiten en overheden het mogelijk gemaakt om gegevens te extraheren over de periode, hoogte en trekroute van monarchvogels en vlinders uit deze romme. Deze informatie is nuttig voor landbeheerprogramma's. boerderijen en andere activiteiten die de vogel- of insectenpopulaties kunnen beïnvloeden. |
| |
De weerradar kan ook puin in de onderzochte atmosfeer waarnemen die door verschillende gebruikers
kan worden gebruikt: |
| |
- As van bosbranden: bosbeschermingsdiensten kunnen het gebruiken om de bron van branden en hun
evolutie te lokaliseren. |
- Val van meteorieten: maakt het mogelijk om gebeurtenissen te volgen en te tellen die anders niet
zouden worden gerapporteerd |
- Explosiebrokstukken zoals het uiteenvallen van de shuttle Columbia op 1 februari 2003 en de explosie
van het treinongeval Lac-Mégantic op 6 juli 201370: stelt hulpdiensten in staat explosies te lokaliseren
en onderzoekers om gebeurtenissen te reconstrueren. |
- Puin in de lucht gegooid door een tornado: bevestigt voor meteorologen het geweld van een storm en
maakt zo de voortzetting van de reeds geldende weerswaarschuwingen mogelijk. |
|
|
 |
| Migratie van vogels gezien door radar. |
|
| |
 |
| Wrak van de Columbia-shuttle gezien door een NEXRAD-radar. |
|
|
| Windturbines |
Windparken zijn een nieuwe bron van valse opbrengsten. De masten zijn van metaal en de bladen van deze apparaten zijn meestal gemaakt van glasvezel
of koolstofvezel, maar bevatten een metalen inzetstuk dat dienst doet als bliksemafleider. Ze kunnen een vrij intens signaal teruggeven aan de radar als
ze zich op voldoende hoogte bevinden om in de zichtlijn van de bundel te zijn. Hoewel de echo van een enkele windturbine ver van de radar verwaarloosbaar kan zijn in het gemeten volume, zal een windpark dichtbij de radar een niet te verwaarlozen totaalrendement opleveren. Als de bladen draaien, zullen de radiale snelheidsgegevens ook niet nul zijn. |
| |
| Zo kunnen echo's van een windpark worden aangezien voor neerslag of ermee vermengd worden. In het laatste geval, als de oriëntatie van de bladen correct is, kan men zelfs een doublet van snelheden waarnemen die zich van de radar af bewegen en naderen, dat lijkt op een mesocycloon en dat ten onrechte zal worden gedetecteerd door het gegevensverwerkingsprogramma. |
|
|
 |
| Reflectiviteit (links) en radiale snelheid (rechts) ten zuidoosten van een radar. Omcirkelde gebieden zijn afkomstig uit een windpark |
|
| |
| Dit gebeurde bijvoorbeeld in 2009 in Dodge City (Kansas), VS, en veroorzaakte een onnodige tornado-waarschuwing toen een draaiende tornado-signatuur werd geanalyseerd in lokale NEXRAD75-radargegevens |
| |
| Ten slotte zijn windturbines een fysiek obstakel dat de radarstraal gedeeltelijk onderbreekt en daardoor problemen veroorzaakt met volledige of gedeeltelijke schaduwgebieden. Net als andere blokkades, vermindert dit het rendement van neerslag stroomafwaarts van het windpark, wat zal leiden tot een onderschatting. Er zijn studies gaande, zowel naar windturbines om hun radarequivalent oppervlak te verkleinen als naar radaralgoritmen om ze in staat te stellen windturbines te onderscheiden van andere echo's. |
|
| Verzwakking |
Elke elektromagnetische golf kan worden geabsorbeerd terwijl ze door elk medium gaan, omdat ze de moleculen waaruit ze bestaat, opwindt.
Dit kan dus een deel van de fotonen verwijderen om het energieniveau van het medium te veranderen. De lucht absorbeert weinig, maar het watermolecuul wel. Hoe dichter de draaggolflengte van de radarbundel bij die van de waterdruppels ligt (0,1 tot 7 millimeter), hoe meer de dipool
van deze moleculen zal worden geëxciteerd en hoe meer de golf zal worden afgezwakt door de aangetroffen neerslag. |
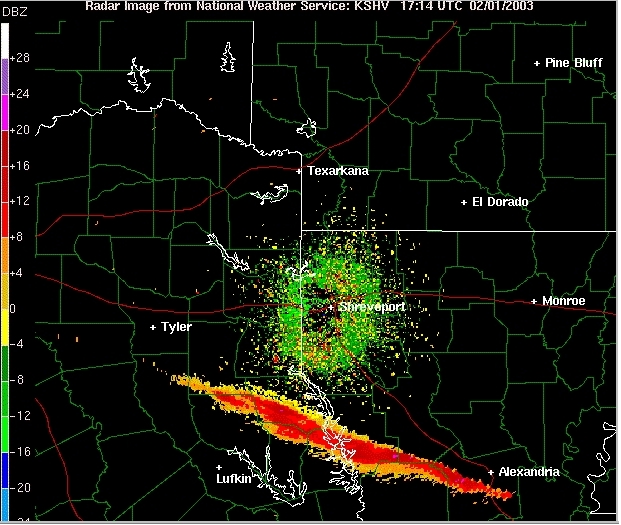
Als gevolg hiervan gebruiken weerradars over het algemeen een golflengte van 5 cm of meer. Op 5 centimeter is er bij hevige regenval een signaalverlies stroomafwaarts van hen op het radarbeeld (zie afbeelding). De demping is echter nihil tot acceptabel bij lichte tot matige neerslag en bij sneeuw. Dit is de reden waarom de meeste landen in gematigde streken (Canada en een groot deel van Europa) deze golflengte gebruiken. Het vereist minder dure technologie (magnetron en kleinere antenne).
Landen met een prevalentie van zware onweersbuien gebruiken een golflengte van 10 centimeter die onder alle omstandigheden verwaarloosbaar wordt verzwakt, maar duurder is (klystron).
Dit is het geval in de Verenigde Staten, Taiwan en anderen. |
|
 |
| Voorbeeld van sterke demping door een lijn van onweersbuien die over een radar met een golflengte van 5 cm gaat (rode pijl) |
|
| |
| Golflengten van minder dan 5 cm worden sterk verzwakt, zelfs bij matige regen, maar kunnen nuttig zijn op korte afstand, waar de resolutie fijner is. Sommige Amerikaanse televisiestations gebruiken naast lokale NEXRAD ook radars van 3 centimeter om hun publiek te dekken. De dubbele polarisatie van meteorologische radars maakt het echter mogelijk om nieuwe parameters te gebruiken om verzwakte gegevens te corrigeren. Verschillende landen die hun C-band radarnetwerk op deze manier updaten, zoals Canada en Frankrijk, werden ontwikkeld om deze correctie automatisch uit te voeren. Deze algoritmen variëren met straalkarakteristieken en golflengte. |
| Heldere banden |
Zoals we eerder hebben gezien, is de terugkeer van reflectiviteit evenredig met de diameter, het aantal en de diëlektrische constante van het doel. Tussen een sneeuwvlok en een regendruppel van dezelfde massa is er een significant verschil in deze drie variabelen. De diameter van een vlok is
dus veel groter dan die van de druppel, maar de diëlektrische constante is veel kleiner. Omdat vlokken langzamer vallen, hebben ze een grotere concentratie dan druppels, maar deze combineren vaak in botsingen om grotere doelen te geven. Wanneer we al deze factoren in aanmerking
nemen en de reflectiviteit van elk van deze twee doelen berekenen, realiseren we ons dat het verschil ongeveer 1,5 dBZ is ten gunste van de daling. |
| |
Wanneer de sneeuw naar de grond daalt en lucht boven het vriespunt ontmoet, verandert het in regen. We verwachten dus dat de reflectiviteit met ongeveer 1,5 dBZ zal toenemen tussen een radardatum die in de sneeuw is genomen en een andere die in de regen is genomen. Op de hoogte waar de sneeuw begint
te smelten, is er echter een verbetering van de reflectiviteiten tot 6.5 dBZ.
Wat gebeurt er? |
| |
Op dit niveau hebben we te maken met natte vlokken. Ze hebben nog steeds een grote diameter, die die van sneeuwvlokken benadert, maar hun diëlektrische constante benadert die van regen en ze vallen langzaam.
We hebben dan de drie factoren die een grotere reflectiviteit bevorderen.
Dit resulteert in een gebied dat de heldere band wordt genoemd. In de radargegevens, op PPI of CAPPI, die dit niveau kruisen, zien we dan een verhoging van de neerslagintensiteiten die niet reëel is. |
| |
| Het gebruik van de neerslagsnelheden die door de heldere band zijn verontreinigd, leidt daarom tot een overschatting van de hoeveelheden regen op de grond. Er zijn verschillende technieken ontwikkeld om dit artefact te filteren door verschillende meteorologische diensten. Het algemene principe is om het niveau van de heldere band te lokaliseren en de gegevens te gebruiken in de regen eronder, indien mogelijk, of anderszins in de sneeuw erboven, maar met correctie. |
|
|
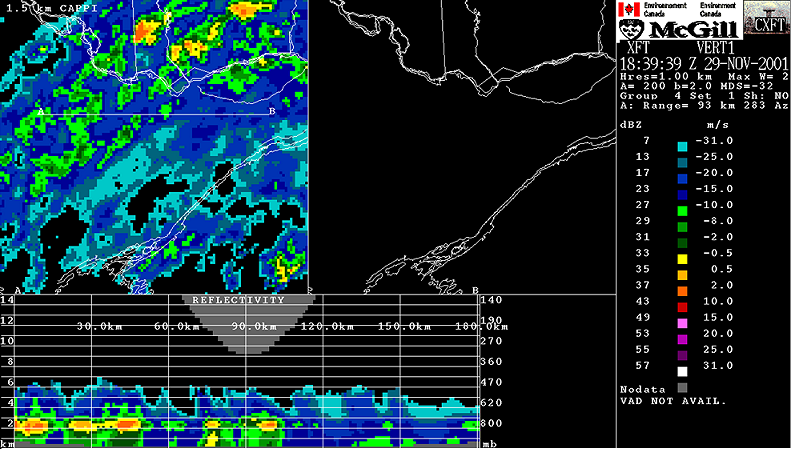 |
Op de top, CAPPI op een hoogte van 1,5 km zwaar vervuild door de heldere band (echo's in geel). Het onderste verticale gedeelte laat zien dat tussen 1,5 en 2,5 km de radarecho's intenser zijn.
Dit is de heldere band die wordt veroorzaakt door smeltende sneeuwvlokken |
|
| |
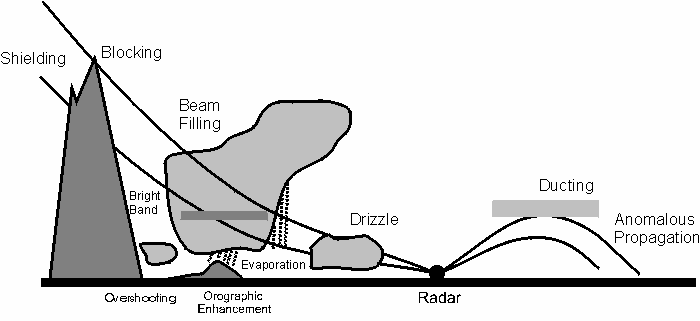
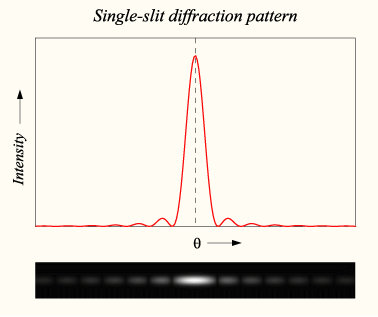
| Straalgeometrie |
De uitgezonden straal is geen potlood zoals een laserstraal, maar heeft eerder de vorm van een diffractiepatroon door een spleet, aangezien de uitgezonden golf door de spleet van een golfgeleiderbuis naar het brandpunt van een satellietschotel gaat. De centrale piek (de radarbundel) is min
of meer een Gauss-curve, maar er zijn secundaire pieken die ook doelen buiten de hoofdas kunnen verlichten. Alles wordt gedaan om de energie
van de secundaire pieken te minimaliseren tot een klein deel van de centrale piek, maar ze zijn nooit nul. |
| |
Wanneer de radarstraal over een bijzonder sterke echo gaat, is de energieteruggave van de centrale piek in de zichtlijn. De terugkeer van de secundaire pieken (zie secundaire lob) arriveert, van hun kant, op hetzelfde moment dat de centrale piek een andere gezichtshoek verlicht.
Aangezien de ontvanger de kijkhoek van de centrale piek noteert, worden de terugkeer van de secundaire pieken daarom genoteerd bij het verkeerde azimut, wat een zwakke valse terugkeer aan weerszijden van onze ware echo creëert. |
 |
| Afbeelding-1 |
|
|
 |
| Afbeelding-2 |
|
|
 |
| Afbeelding-3 |
|
| |
| 1: Geïdealiseerde energieverdeling van een radarstraal (centrale lob op 0 en secundaire lobben aan elke kant) |
| 2: Diffractie door een cirkelvormige spleet die de energie simuleert die wordt bekeken door weerdoelen |
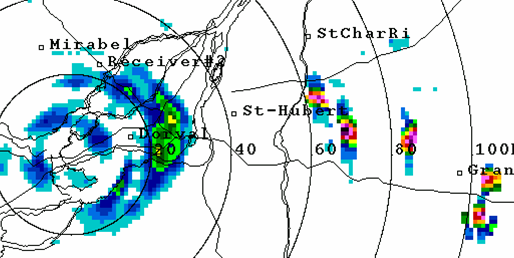
3: De sterke echo's zijn terugkeer van de centrale piek van de radar uit een reeks kleine heuvels (gele en rode pixels). De zwakkere echo's aan
weerszijden zijn afkomstig van secundaire lobben (blauw en groen) |
| Meerdere reflecties |
| De radarstraal wordt door het doel in alle richtingen gereflecteerd. Over het algemeen is het rendement van meerdere reflecties in de cloud verwaarloosbaar. In bepaalde omstandigheden waarbij de kern van de neerslag intens is (zoals hagel), zal een aanzienlijk deel van de energie van de radarstraal naar de grond worden gereflecteerd. Omdat dit laatste erg reflecterend is, zal het een groot deel ervan terugsturen naar de cloud. Het gebied met veel neerslag heeft uiteindelijk een deel ervan teruggegeven aan de radar83. We zullen dan een reflectie met drie lichamen hebben. |
| |
| Omdat deze extra echo later arriveert dan de initiële wolkenecho, zal deze vanwege het langere pad abusievelijk achter de echte neerslagecho's worden geplaatst84. Op een PPI of CAPPI zal het de vorm aannemen van een kegel of een langwerpig gebied van lage intensiteit achter de meest intense kern van de neerslag. In een verticale doorsnede zullen we zien dat deze kegel de grond niet raakt. Het zal zich in radiale richting uitstrekken langs een elevatiehoek naar de radar en door de kern gaan. |
|
|
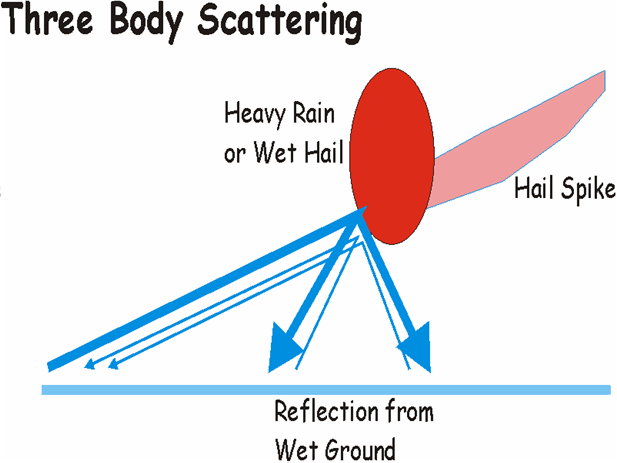 |
| Reflectie van de radarstraal door hagel |
|
| |
| Huidige en toekomstige oplossingen |
| |
| Filteren |
De volgende lus laat zien hoe men een onbewerkt beeld van reflectiviteit kan opschonen om de echte echo's als gevolg van neerslag te vinden. Aangezien de laatste over het algemeen mobiel zijn, blijven we alleen de echte echo's over door de echo's te elimineren waarvan de snelheid nul is, verkregen door Doppler-verwerking. Hoewel de behandeling complex en feilbaar is, geeft ze over het algemeen zeer interessante resultaten. Problemen als gevolg van de verandering in het type neerslag, de vermenging van deze en niet-meteorologische doelen, zoals vogels, kunnen op
hun beurt worden gefilterd door het gebruik van een filter afkomstig uit de polarisatiegegevens. Dit begint operationeel te gebeuren en geeft goede resultaten. |
 |
| Radarbeeld van reflectiviteit met veel niet-weersecho's. |
|
|
 |
| Hetzelfde beeld maar dan gefilterd |
|
|
 |
| Phased Array Weerradar in Norman, Oklahoma |
|
| |
| Kleinschalig netwerk |
| Radarresolutie is ook een belangrijke factor bij het identificeren en meten van neerslagintensiteiten. Men kan de diameter van de antenne vergroten om de breedte van de bundel te verkleinen, maar de kosten zijn belangrijk. Een andere manier is om de dichtheid van het radarnetwerk te vergroten om de gegevens te gebruiken die zich het dichtst bij elke radar bevinden, waar de straal het smalst is. |
| |
Een zo'n programma, CASA genaamd, voor Center for Collaborative Adaptive Sensing of the Atmosphere, verdeelt het gebied dat wordt bestreken door reguliere radar en elke sector wordt gedekt door een kleine, goedkope radar die alleen op laag niveau peilt87,88. Dit voegt informatie op laag niveau met een hoge resolutie toe en vult het gat in de gegevens op de minimale hoek van de hoofdradar. Een dergelijke array kan een kortere golflengte gebruiken waardoor de antennes kleiner worden, maar de verzwakking door neerslag is aanzienlijk. Elk punt moet dan worden gedekt
door verschillende radars die de verzwakking zullen compenseren door elk punt vanuit een andere richting te "kijken". Zo'n netwerk zou in theorie zelfs de huidige radars kunnen vervangen als de kosten en de technologie van de coördinatie van het sonderen concurrerend worden. |
| |
| Elektronisch scannen |
| Sinds 2003 is een driedimensionale phased array-radar, gekocht van de Amerikaanse marine door de NOAA-weerdienst, getest om het nut van dit concept bij het detecteren van neerslag te zien. Het voordeel van dit type antenne is om in een veel snellere tijd een geluid van de atmosfeer te verkrijgen dan met een conventionele antenne, waardoor het mogelijk wordt om de evolutie van stormen te zien met een veel hogere temporele resolutie. Aangezien de laatste kenmerken zeer snel kunnen veranderen en aanleiding kunnen geven tot zwaar weer, is de hoop om beter te kunnen anticiperen op het begin van gewelddadige verschijnselen (tornado, hagel, stortregens en neerwaartse buien) en zo de waarschuwingsberichten voor het weer te verbeteren. |
| |
| Geschat wordt dat het 10 tot 15 jaar zal duren om het onderzoek te voltooien en de plannen te maken om een nieuwe generatie weerradars te bouwen met behulp van dit principe, die in minder dan 5 minuten een volledig geluid zou kunnen geven. De geschatte kosten van dit experiment bedragen 25 miljoen USD. |
|
|
|
Bronnen: Wikipedia-fr,
Wikipedia-en |
|
|
|
|
 Meteorologische instrumenten
Meteorologische instrumenten